
Tymtravler
USA
Asked
— Edited
Camera Questions
I am using the EZ wireless camera and I have it setup on a pan and tilt platform. No matter what setting I set, motion, face, color all it wants to do is jump around. It will not track my face or follow a ball. I have tried relative track, track by motion with the same results. I have changed the frame rate also just to see if that was an issue. Any suggestions. Thanks

Check your inverts, it's the most common issue I've come across.
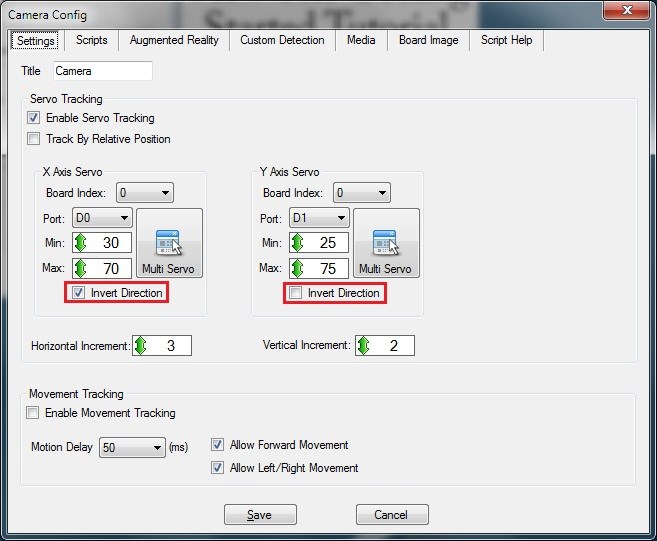
This is how mine is set up for a pan/tilt
Also make sure you have decent light and have the grid set up correctly.
Do you get any coloured boxes around anything in the processed video? Does the debug give any indication of anything happening?
I do not have any of my invert boxes checked, light is good, and yes I do get colored boxes, so it does look like the camera is seeing the object. Also the grid is setup as default. Thanks Rich
If it gets the coloured boxes it should be tracking to center the boxes with the middle of the grid.
If it's jumping around you may need to try the invert boxes, I had it with Melvin when I didn't know if it needed it or not, he would go mad when tracking until I ticked the invert box.
It's only 4 choices really so it's always worth trying them all. X off Y off X on Y off X off Y on X on Y on
That'll at least eliminate that from the possible causes.
Also check that the min position is always lower than the max position, I recall one user having these backwards (i.e. max at 10 and min at 90) and it went a little crazy.