Asked
— Edited
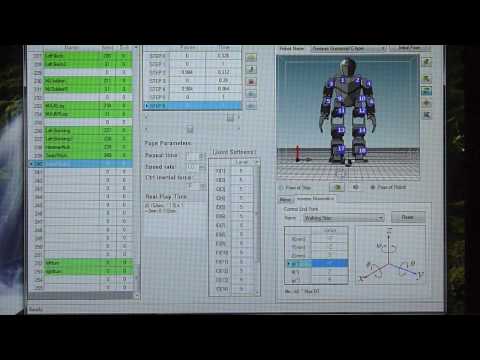
Anyone Familiar Whit Motion From Robotis?
when i wanna use inverse kinematics and press enter the value goes to zero back again.when normal it chould take the pose you set.
 MPU6050 Tilt Angle Sensor
— Flash Arduino Uno firmware to read DHT11 temp/humidity and MPU6050 IMU simultaneously; provides $AngleX, $AngleY and $AngleZ variables.
Try it →
MPU6050 Tilt Angle Sensor
— Flash Arduino Uno firmware to read DHT11 temp/humidity and MPU6050 IMU simultaneously; provides $AngleX, $AngleY and $AngleZ variables.
Try it →
when i wanna use inverse kinematics and press enter the value goes to zero back again.when normal it chould take the pose you set.

found it.it was left ctrl and enter