
wes3066
USA
Asked
— Edited
4 Wheel Drive Thumper H Bridge Help
Well really I want to ask three questions here;
using the 2.5amp dual motor controllers, could I not wire the front and rear of the left and right side of the motors together on the 4wd wild thumper chassis and only use one motor controller?
how would I control the second motor controller, or would I just jump the same control wires from the first one to the second?
3.if I use a 12v rechargeable battery can I directly connect it to the ezb or will it blow? Currently I am using a 7.2 volt RC battery which seems to work fine.
thanks in advance for the help!

Hi, I used one Hbridge. It works but turns only when on floor.. not on rug.
I add extra battery packs becaue the pack that come with EZ is not powerful to do much.
I used 2 - 7.2 V 1600 ma in series and it performs great. But still will not turn on rug well.
If used for long time, especiallyturning Hbridge gets warm.
I am thinking of addding another Hbridge if I continue with this design.
Now just testing and learning.
Haven't made a wheeled robot but jackphillips seems to have made it work like you want it to.
To run the second motor controller you need to write an EZ Script. Search the forum. There should be something someone already wrote that can help you. I'm running 3 H bridges in my robot but all are controlled by scripts with poison feedback from pots. My DC motors will not travel more then 360 Degrees.
I have 3 EZ-B's in my robot and all are supplied by 12vdc. Works great but the regulators get warm. A 5v fan powered by the EZ-B it's self solves that. I think the EZ-B will take up to 17 vdc.
Hi,
I probably need to increase the power up later to at least 12 volts to get more speed, but it is pretty quick already.
Turning on the Thumper is very difficult for precise handling.
I am trying to come up with docking routines but maneuvering is jumpy.
Also using the PWM is useless unless set 100%.
That is probably why I need more power.
Also Thumper I think is not the greatest platform for precise work I need.
Every video I see on Thumper the users go wild with it ... not the reason I bought it.
I need a stable platform that can carry some weight.
But it was a good learning tool to start working with.
I wonder if I really should have had wired for with the PWM or just went to full power with controlling speed?
Anyone out there play with Thumper a lot?
If you set your PWM slider at 100% then you will get 100% speed. No difference, just an added step you did.
thanks for the tips, yes I do need to increase to a 12 volt rechargeable battery with more current or just add another 7.2 volt battery to give me 5600 mAH run time. The speed is ok for what I want I don't want a speed demon. I was wondering now however can I hook the same control lines to a second h bridge to run to more additional mores in the front or do I connect the motors and series and then to the h bridge? I was leaning towards connecting the same control lines to a second h bridge so there might not be a big problem with heat and a risk of burning out the L298. Sorry I am new to this and want to do the right things first everything else I have figured out by watching the videos online.
I don't really know if you can attach two motors to one hbridge but I don't really know why not. As long as you don't draw more amps then the H Bridge can handle. Make sure your wiring is correct. I would think you need to wire in parallel. Do an internet search through Google. I bet you'll find lots of answers. Let me know.
Once you do your internet research I say give it a try. No guts, no glory I always say. (What's the worse that can happen? Release the magic smoke and buy another H-bridge.) eek
I did a quick Google search and found a lot of info on this, Here's just one link and supports my above answer:
cr4.globalspec.com/thread/3596/Can-I-Use-an-H-Bridge-For-Two-Motors
Sounds that one motor may lag behind the other one though. don't know if this will be a problem for you. If your using them on treads or wheels your robot may go in circles.
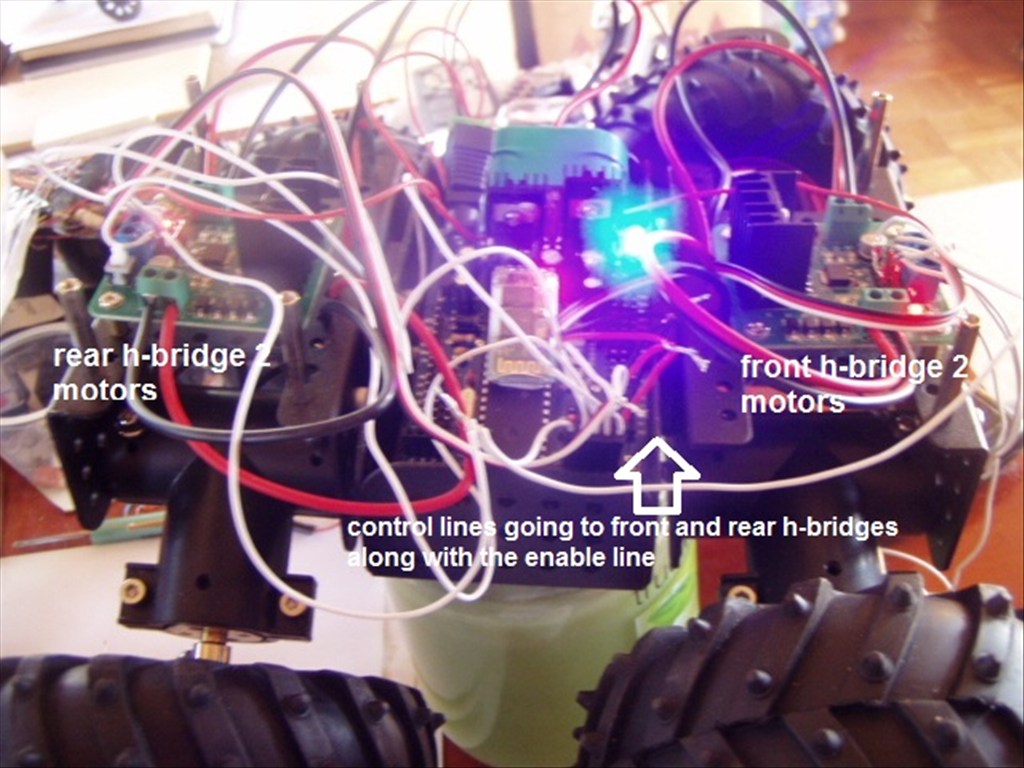
yes after doing what you said, I found that one h-bridge will have one motor lag behind, not worried about the magic smoke right now has happened before an old friend of mine lol. So I would assume I could run a different h-bridge on the front two motors using the same control lines as shown in the video. In other words, (on my design) D15-D19 would not only be wired to the first h-bridge, but a second one as well so those control lines would control two h-bridges together thereby doing away with the lag and magic smoke issue,....I think. I am using the wild thumper 4wd chassis not the 6 wheel one, might tackle that one later after I work out the issues with this one first. Mainly looking for a hardware solution to the problem instead of trying a software solution for now. Thanks again for the suggestions and links it is a great help!