In order to use this app, you need Synthiam ARC software.
| For | ARC |
| Author | WBS00001 |
| Created | |
| Last updated |
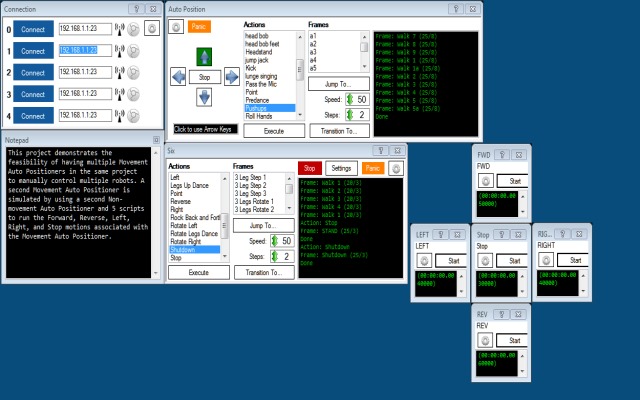
This project demonstrates the feasibility of having multiple Movement Auto Positioners in the same project to manually control multiple robots. A second Movement Auto Positioner is simulated by using a second Non-movement Auto Positioner and 5 scripts to run the Forward, Reverse, Left, Right, and Stop motions associated with the Movement Auto Positioner.
