
clintard
USA
Asked
— Edited

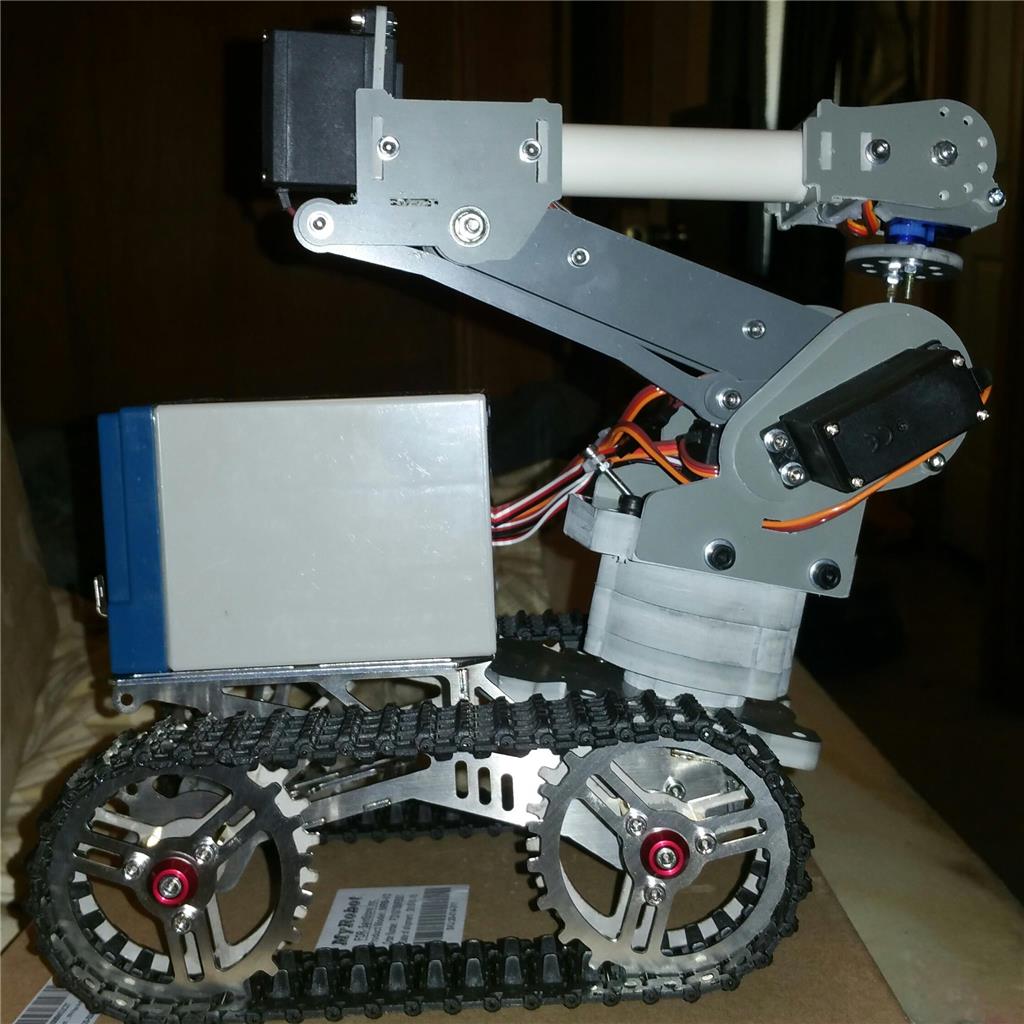
Peadro Robot Build
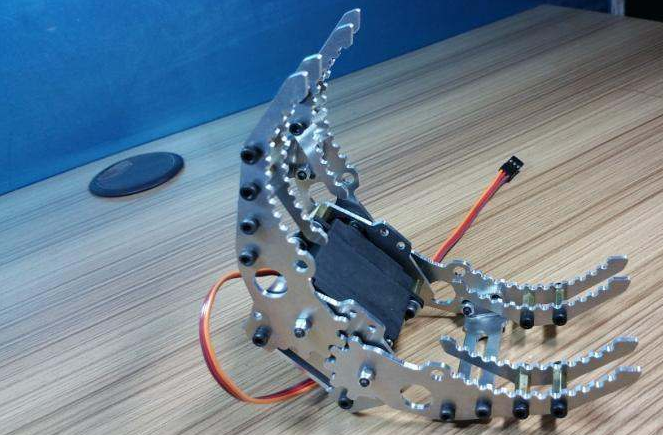
6 DOF robotic arm 12 volt gear motor driven tracked chassis with 10 pound capactiy 12 volt 6 amp hour battery
Im going to use a DROK step down to lower the voltage where i like it for the servo's, and use an H bridge getting 12 volts to run the motors for the chassis.
Is there a way to interface this camerai bought for my Rpi3 so it will work in ARC ? Its a waveshare https://www.amazon.com/Waveshare-Raspberry-Camera-Vision-Raspberry-pi/dp/B00N9YWLHE?ie=UTF8&psc=1&redirect=true&ref_=od_aui_detailpages02
Pics below:










Also,
does it make any sense when i ask if its possible to use the RPI3 flashed with the windows 10iot as a standalone computer to run ARC on the robot itself similar to how people use laptops to run the inmoovs?
You can't run ARC on Windows10 IOT, but if you are handy with programming, you could use the Universal Bot SDK to write the functions you want onboard on run it on an RPI3 https://synthiam.com/Products/ARC
Personally, I would spend the extra for a small Windows 10 computer. You can get one around the same size as an RPI for ~$100 that is more than sufficient for running ARC.
What are the amps of that step-down voltage regulator? You need to be concerned with inrush current on the servos. Although they don't pull much when running, they pull a ton of current at startup and can easily brownout your EZ-B if you aren't supplying enough amps.
Alan
BTW, did you build or buy that chassis and arm? I like the look of the chassis very much.
Alan
I bought the chassis as well as the arm from amazon from a company called sainsmart.
https://www.amazon.com/SainSmart-Tracks-Development-Platform-Arduino-Rover/dp/B017LTFQR4?ie=UTF8&psc=1&redirect=true&ref_=oh_aui_detailpage_o06_s00
And the converter: Parameters: Input voltage: 5-35V Output voltage: 0-33V Output standard current: 2A Max current: 3A (we suggest you to leave margin) Output power: 30W Max Output current: 1.5A(please enhance cooling when > 1.5A) Output voltage preset resolution: 0.1V Voltage testing accuracy: +/-1%; +2 words Display frequency: 2 times/second Parameter set way: micro switch Operating Temperature: -10? ~ 40?
I was concerned about the amperage of the voltage regulator as well. Is there an easier or better alternative to step down from 12 volts to something the servos can handle that can supply the amps needed?
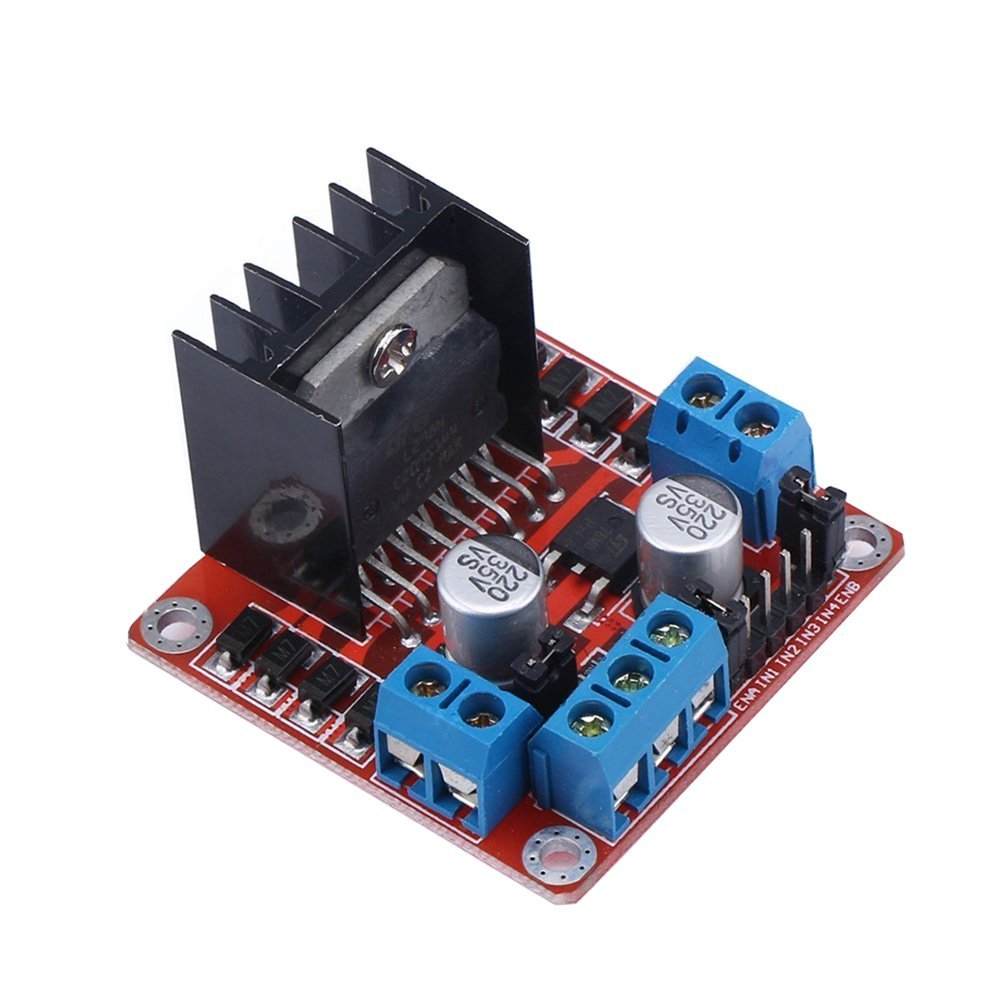
The L298N dual H bridge is more than adequate i believe to drive the 12 volt dc gear motors
Specification: Chip: L298N Logic voltage: 5V Logic current 0mA-36mA Storage Temperature: -20 ? to ? to +135 Operating mode: H-bridge driver (dual) Drive voltage: 5V-35V Drive current: 2A (MAX single bridge) Maximum power: 25W
Also, the reason i went with that sealed lead acid, and almost 4 pound battery is for stability. So the arm is not flopping around tipping the chassis over and like a forklift i have a weight ballast to keep it from falling on its face when trying to pick something up. Im still waiting on H bridge to come in the mail so i cant start putting this thing together
A high amp BEC would be better. Here are two choices from Castle Creations:
https://www.amazon.com/dp/B000MXAR12/ref=wl_it_dp_o_pd_nS_ttl?_encoding=UTF8&colid=1F1CMTG38DB3O&coliid=IXYPGTDR8HO1Q
or
https://www.amazon.com/dp/B002ITEL42/ref=wl_it_dp_o_pC_S_ttl?_encoding=UTF8&colid=1F1CMTG38DB3O&coliid=I3560HW9QDGQQL
(first one probably fine for a 12v system).
You will also need the Castle Creations programmer to set it up:
https://www.amazon.com/dp/B000BOG8V0/ref=wl_it_dp_o_pd_S_ttl?_encoding=UTF8&colid=1F1CMTG38DB3O&coliid=ITXQ6NWH138R1
As for the H-bridge, probably OK. Again, it always comes down to amps, not volts. You want an H-bridge rated for the maximum amps at stall, plus some percentage for overhead.
Alan
Thank you Alan. I will see how she does with the dinky little 3amp step down powering the ez-b and servos off the 12 volt battery for now, but since i want to run sensors, another pan/tilt camera mount with servos etc off the ez-bv4 i will upgrade