Asked
— Edited

Mini Mod To The Ezb(4)
For those EZB(4) users that have a vertical clearance challenge, there are a couple of things that can be done to shorten the amount of vertical space occupied by your new version 4 EZB.
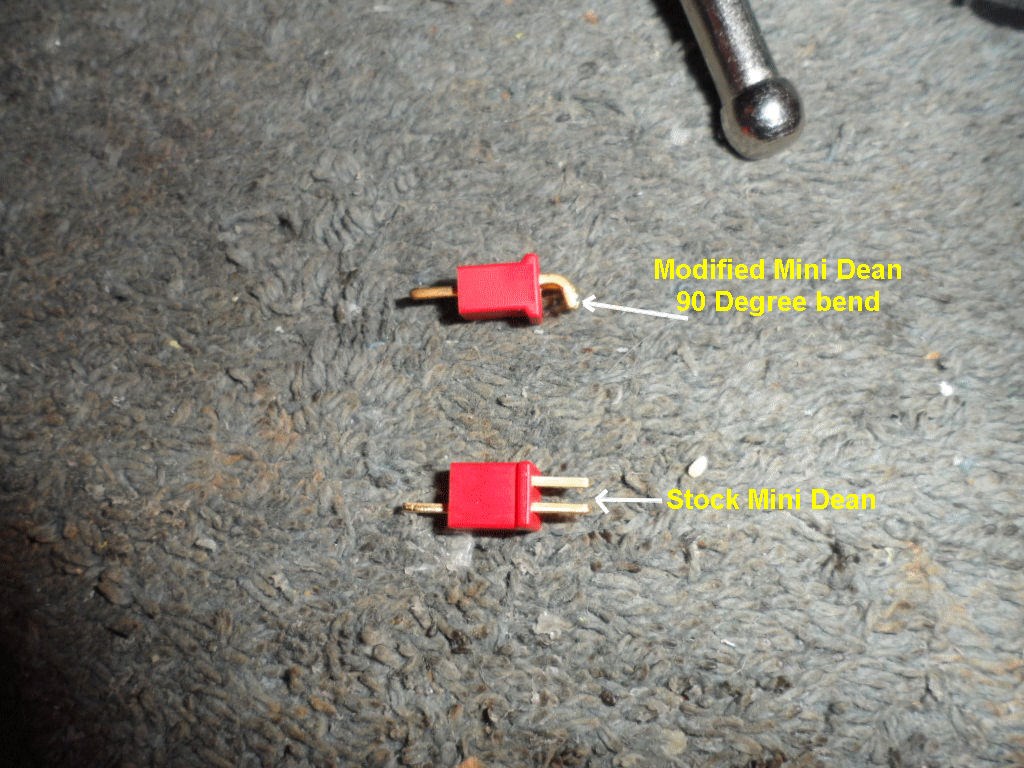
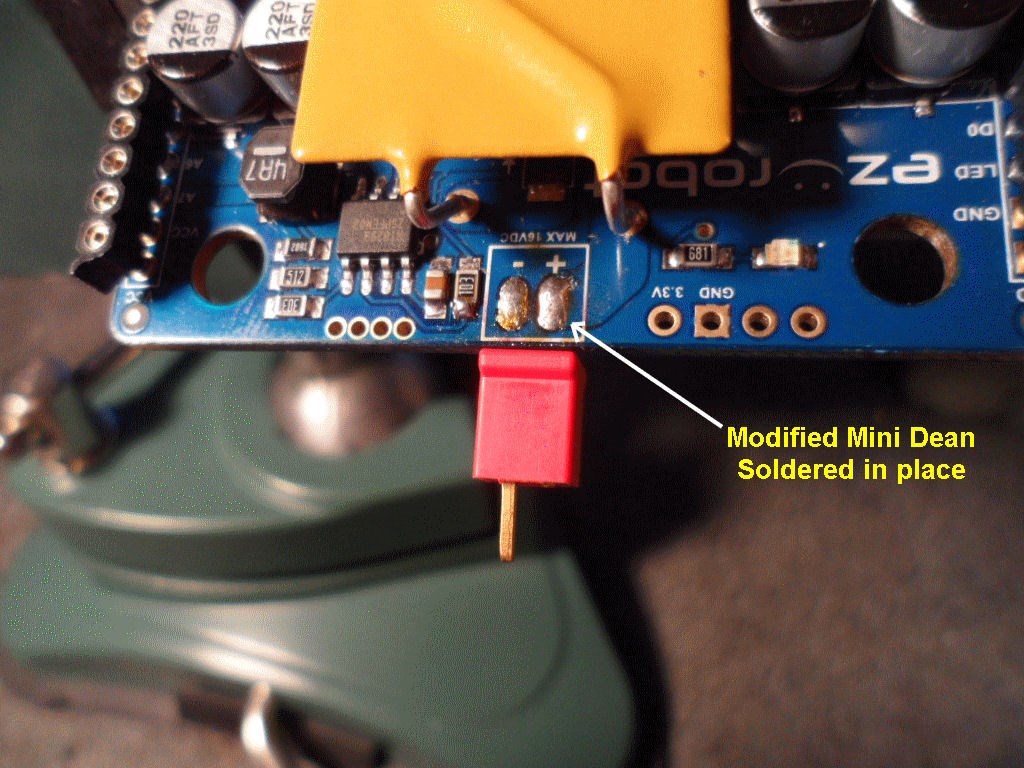
First you can remove the outer shell and gain some additional space. Second you can remove the original Mini Deans power connector, then modify a new min-dean connector by bending the contacts 90 degrees and solder it into place. This effort will also provide you with just a little more vertical clearance for your project effort.

I like it.
j
:)


Oh, I like it :-)) I have not so much space in my robot. It's a nice idea, thanks :-)
Cool idea! I like it!