airwave1206
I2c Compass Questions
Hello DJ and the others, I know I am most likely beating a dead horse here. I was posting in a different forum about my issues with the Sure compass. So I am now starting a new post to hopefully get some things straight. My issue is the EZ-B and ARC lock up in 10 seconds after the I2C compass control is opened in ARC. I know there is nothing wrong with the EZ-B or the ARC. They both work flawlessly up to the point I insert the I2C compass window in ARC. After 10 seconds of readings the white light on the EZ-B goes out and ARC locks up to the point I have to Ctrl/Alt-Del to get out of it. DJ and the others on here were telling me my wires are too long. I went from " to about 6mm now on a pc board. I have 2- 10 Ohm resistors from 5+ to the SDL and SDA pins. That gained me a whole 5 seconds more of operation. I have read that some have put the resistors on the ground side. I ready don't know at this point what else to do. I thought it was my on board mini ITX, the Wi-Fi radio, the Bluetooth radio or and other interfering device. So I disassembled my robot completely. I now just have the EZ-B, an usb TTL adapter, the compass module and the desktop pc running. So there is no other chance of interference for anything. I am just running out of ideas. Any help would be grateful.


@airwave1206 Please take a look here https://synthiam.com/Community/Questions/2320 connection ets are outlined please check resistor value it may be low ,also its to ground I used 10k to ground and it worked
@Ireland thanks I will try that. I seen that post as well. some say ground and some say 5+. so I have tryed 5+ now I will try ground. what other resistors should I try if this doesnt work?
@Ireland nope, just tryed it with the grounds. it only made to 6 seconds. its worse that it was before. thank for the sugestion. I seen on the I2C web site you can go up to 47K ohms. I dont know what way to go on resistor sizes.
@Ireland what compass interval have your set to? I changed mine to 1000ms and got a longer run time.
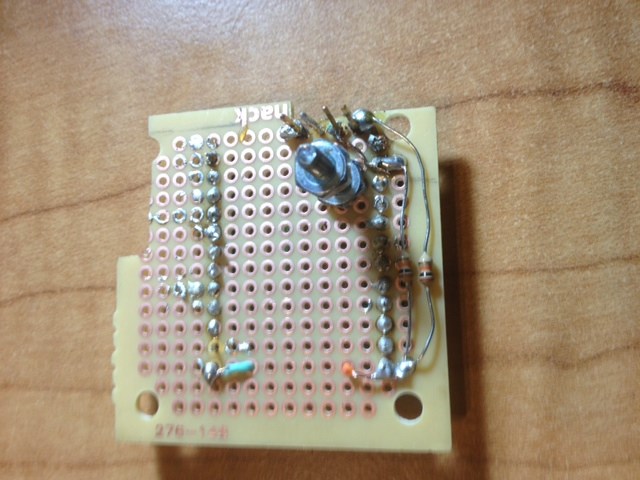
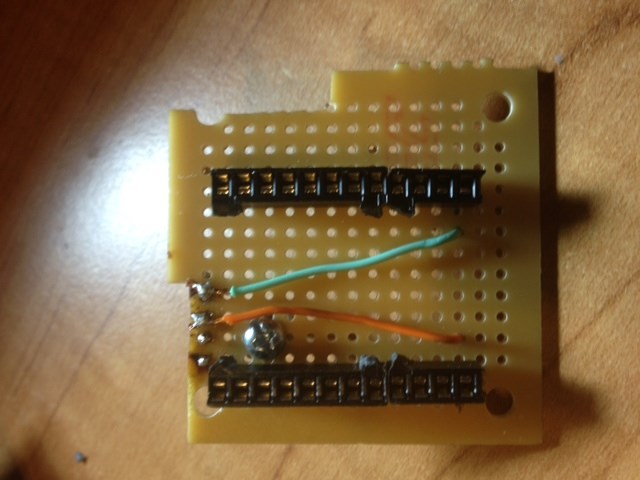
sorry for delay in getting back While I dont have my compass connected at present my connections are 10k resistor between gnd & sda 10k resistor between gnd & scl
I had the same problem you are having until I connected the resistors like this. Best of luck Oh thanks for @Ireland, glad to be representing my country
@Bravia Sorry for the confusion on the @Ireland, I kind of new to the forum thing. I used you country instead of you name. Thanks for all the advice. I have mine hooked up with the grounds and with still no success. I did find if I increase the refresh rate to 10000ms the compass runs longer, but still locks up in the end. I wounded if there anything I can see with a scope. Once again, thank you for all your help.
What is the value of the resistors you are using
10k ohm