How To Hook Up Home Made Shaft Encoder.
I have a 24vdc DC motor that has a homemade shaft encoder installed. The encoder is made form a common 2 button computer mouse and has four wires: 1 - Ground (Green encoder wire) 2 - Encoder sensor 1 (Blue encoder wire) 3 - Encoder sensor 2 (Orange encoder wire) 4 - +5vDC - (White encoder wire)
The DC motor also has 2 other power wires: 5 - Motor Lead 1 (Green Motor wire) 6 - Motor Lead 2 (Red Motor wire)
I will be using a H bridge I've bought one from the store here (2.5 Amp Motor Controller) and am up to speed on how to connect the motors 2 power leads (Lead 5 & 6 from the above list) and this board to the Ez-B (I hope).
What I'm having trouble understanding is how and where to connect the wires from the shaft encoder (disemboweled from the mouse) to the Ez-b so I can control the possession and direction of the motor. The ground and +5vDC seem straight forward but what about the two encoder sensor wires. To help show what I have here is a description of how this encoder works:
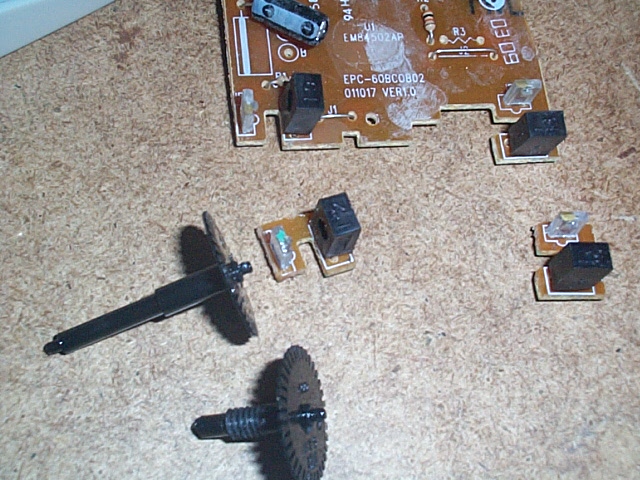
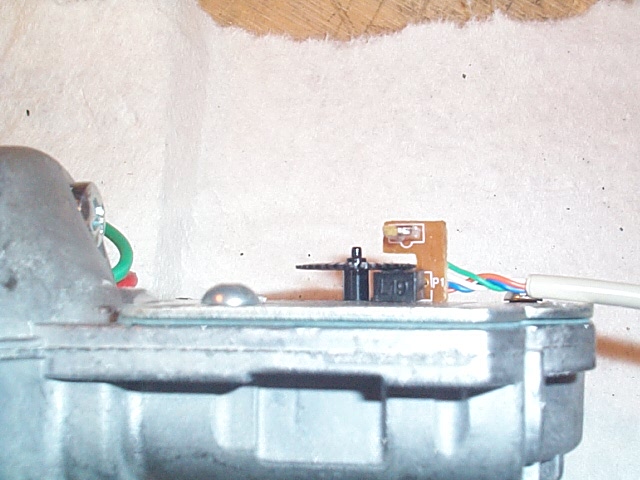
The encoder sensor consists of an IR LED and a pair of IR sensors in a tiny black package. The pair of sensors are slightly offset such that, as the encoder disk rotates, each one turns on/off out of phase with the other. This allows one to be used as a counter and the other to be used as a direction indicator, in other words, a quadrant encoder.<<<
Here is a link to a couple pictures of it removed from the mouse and then installed in the motor: https://www.b9robotbuildersclub.com/pub/builders/scrapbooks/images_B90002/10052004/DCP03140.JPG https://www.b9robotbuildersclub.com/pub/builders/scrapbooks/images_B90002/10052004/DCP03171.JPG
Now, assuming I can even do this; once we get it hooked up properly to the EZ-B, what control do I use in ARC?
Thanks in advance for any help. David Schulpius

{kind=link}
{kind=link}
OK, in the interests of moving forward on my build I decided to forgo using the built in shaft encoder and try using a Potentiometer hooked up to the outside shaft end. Seemed an easier solution sense DJ has an example already loaded in the ARC with a written script that will work with my DC motor H Bride.
One question; What size & type pot to use? Linear or Logarithmic. I tried using a B50k (Linear I think) pot and it seemed to work OK but didn't have an even rise & fall on the ADC meter as I turned the shaft. I then tried a B25K and blew a 1/2 amp SB fuse that I installed before the EZB board when I adjusted the shaft.
Thanks for any advice.
Dave Schulpius
DAVE i been looking for the same idea ,i have both optical and magnetic encoders,dj did say he was going to make a interface for it. NUBOTICS does make a wheel commander where is has encoder inputs and motor outputs it has I2C buss interface that can be connected to EZB NUBOTICS wheel commander