
Maps Are Opinions: When Your Robot Argues With Your House
Your robot doesn’t draw a floor plan. It negotiates one. Every scan is a vote. Every bump is a counterpoint. Welcome to the quiet domestic debate between lasers and drywall.
If you’ve ever moved a couch and watched your bot get dramatic, you’ve seen it: the map is not the territory—it’s a guess with great posture.
Maps Are Opinions
Robots don’t see “kitchen.” They see hit-or-miss dots and decide which empties are safe. It’s statistics with furniture.
LiDAR + SLAM
A laser measures distance. SLAM stitches scans into a map while tracking the robot’s pose. It’s like building a jigsaw while riding a skateboard.
ARC as Referee
Synthiam ARC fuses sensors, skills, and logic so your bot questions bad data without freezing like a Roomba at a mirror maze.
Your Floor Plan Is a Debate, Not a Drawing
Your robot thinks in maybes. Each laser ping returns a distance, not a truth. A “hit” says, “probably a wall here.” A “miss” says, “probably open.” Stack thousands of those and you get a map that’s more like a weather report. High chance of hallway with scattered chairs.
That’s why the same room can look different on two runs. The bot’s opinion shifts with new evidence—like a polite scientist who also bumps into things. Honestly, same.
A robot’s map isn’t what the world is. It’s what the world has convinced it of—so far.

When the Couch Lies: Teaching Doubt
Move a sofa and the robot’s old map gets grumpy. Should it trust the past or the new scan? Good robots keep a memory, but they also forgive. They lower confidence in old cells and raise it where fresh scans agree. That’s not drama—it’s math with manners.
Mirrors, windows, and shiny fridges make things worse. Lasers bounce. Ghost walls appear. A wise bot treats sudden weird shapes like gossip: interesting, but verify with another pass.

Nerd Corner: How It Actually Works
LiDAR is a laser ruler. It fires light, waits for the echo, and times the round trip. Light is fast—about 300,000 km per second—so even a 10 m wall is only tens of nanoseconds away. Each pulse becomes a dot. Many dots form a point cloud. The robot’s job is to line up new dots with old dots while it’s moving. That job is called SLAM: Simultaneous Localization and Mapping.
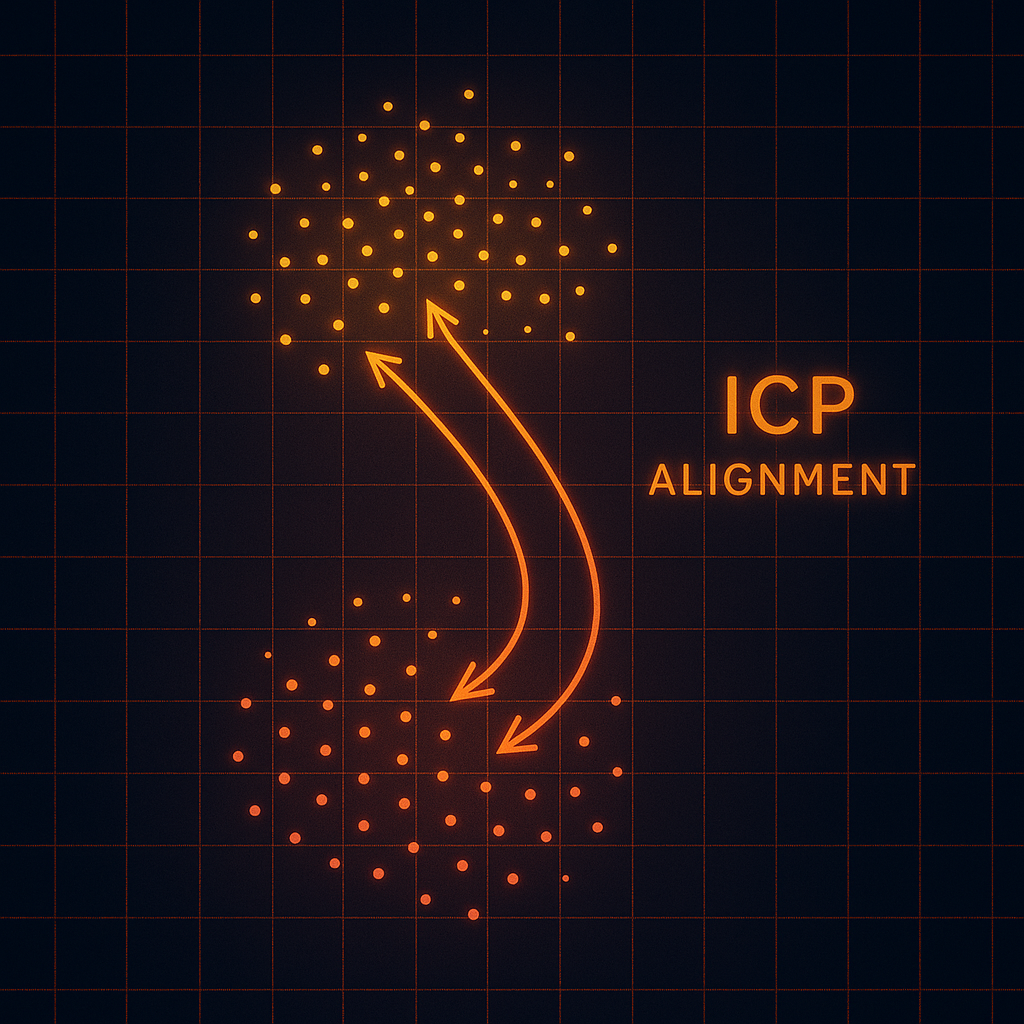
Most bots use an occupancy grid. Think of the world as graph paper. Each square stores a belief: filled or empty. Hits push a square toward “filled.” Misses push it toward “empty.” Over time, you get a grayscale of confidence. To align scans, robots do scan matching—often ICP (Iterative Closest Point)—which wiggles the new dots until they best fit the old dots, like nudging a puzzle piece until it clicks.
When the robot closes a loop—returns to a known spot—it adds a strong vote to correct drift. That step, loop closure, is the bot saying, “Ah, I’ve been here. My map got a little wobbly, let’s tidy that.” It’s like GPS without satellites, powered by humility.
Training a Skeptical Robot: Practical Settings
You tune doubt with knobs. Set min/max range so dust and far echoes don’t count. Pick a scan rate that your CPU can match. Use outlier filters to drop single weird points. Tune the match tolerance so your robot doesn’t “snap” to the wrong wall like a tired magnet. And when furniture moves, let old cells fade instead of treating them like sacred stone.
In Synthiam ARC, the Better Navigator brings this all together. It uses sensor data and mapping inputs to plan movement paths, avoid obstacles, and continuously adapt navigation decisions based on changing environments. Instead of just seeing the world, your robot actively reasons about where to go next—and how confident it is in getting there.
Pair it with an IMU (motion sensor) for steadier turns, or fuse with wheel encoders so straight lines are actually straight. Your bot won’t just map—it will decide.
How Synthiam ARC Plays Referee
ARC treats sensors like witnesses. Each Robot Skill is a specialist: LiDAR reports distances, the IMU reports turns, encoders report wheel motion, vision can spot doors. ARC lets them testify together. With EZB controllers or direct USB, you wire real motors and servos, then script behavior so the robot acts on the map without getting bossed around by one loud sensor.
Try this flow: use navigation with the Better Navigator, blend in IMU and encoders, then set rules like “don’t rewrite the map on one weird pass.” The Synthiam community swaps profiles, tips, and the occasional “my robot found a phantom wall” saga, so you don’t have to learn every hard lesson alone. Robots are autonomous; builders shouldn’t be.
So, when your bot argues with your house, that’s progress. It means the system can change its mind. And a mind that can change is a mind that can learn. What would you ask your robot to doubt—on purpose?

- Maps are probabilities, not portraits.
- LiDAR + SLAM = moving while mapping.
- ARC blends sensors and Robot Skills.
- Tune doubt: ranges, filters, match tol.
- Loop closure fixes long-run drift.
Key Thought
Trust is a parameter. Set it too high and your robot clings to bad maps. Set it just right and it updates like a calm scientist on wheels.
Big Idea
Use Synthiam ARC as the decision stage. Let LiDAR, IMU, encoders, and navigation logic each contribute—and let your system choose the smartest path forward.
