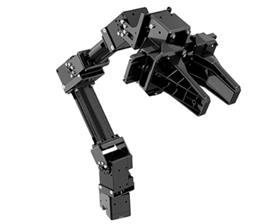
I'm excited to introduce the new items that we will be adding to the store in a week or two. This is a new ez-bit which is an all-in-one Accelerometer/Gyro/Temperature sensor. Here is the new format for ez-bit sensors - which are compact enough to fit in your revolution or custom robot.
Here is the manual page for the device: https://www.ez-robot.com/Tutorials/Help.aspx?id=209
Here's a video where I demonstrate the accelerometer with JD!
Here is the manual page for the device: https://www.ez-robot.com/Tutorials/Help.aspx?id=209
Here's a video where I demonstrate the accelerometer with JD!

@thetechguru
I don't have the ability to listen to the video, just watch. So I was just checking.
@Alan, answer more questions, I've spent surprisingly little with EZ-Robot (I feel a bit guilty about that but it goes away when JD dances...) but then in 4 questions time I will have "earned" over $1,000
I2C is the best connection method for numerous reasons. Plus since it's EZ-Robot made it'll be natively supported by ARC so should be super easy to add, install and use.
Heh.... I try, but you usually beat me to it
Seriously though, I have earned and spent a good bit of store credit, and have some stocked up since there were hints these devices were coming soon.
Alan
@Rich, I am just beginning to seriously understand I2C... So pardon a possible stupid question... Can I assume values from the gyro and accelerometer can be accessed/read via script commands?.... I have an Idea about using the gyro in my inMoov and I will need to use the gyro information in a script or two...
Well the MPU-6050 outputs through I2C, so to keep it a simple sensor.
Here's the documentation for the device: MPU-6050
Your get raw values for the x, y and z-axis so you'd have to do some math to get degrees and angles.
@Richard, they probably can be read through script commands. It depends on the device to be honest. If EZ-Robot make the device I am sure DJ will either make it easy to get values with scripts or have the controls store values in variables.
@Rich.... Well, we know with the demo DJ posted the gyro/accelerometer control must be able to read values in order to use ControlCommand or the auto positioner..... So you're probably right about being able to read the x,y and z axis values into variables.... I guess we'll have to wait for the next ARC update to find out...