
Politeness Is a PWM Signal: Why the Best Robots Move Slowly on Purpose
Speed thrills, but timing builds trust. The secret handshake between humans and robots might be a tiny pause before motion.
We’ve taught machines to see and plan. Next: teach them to wait. Not forever—just long enough to feel like they noticed us. Yes, your robot’s most human trait might be a millisecond delay and a gentler servo ramp.
Speed as a Social Signal
Motion timing tells people what a robot “means.” A small pause can say: I see you. I’m safe. I’m not about to yeet this cup across the room.
Engineering the Pause
PWM, ramps, and jerk limits shape motion. You can dial in calm, predictable moves with simple step-and-delay tricks.
ARC Makes It Practical
Use Synthiam ARC Robot Skills—like Servo Speed—to test and tune how your robot feels in motion, not just how it looks on a spec sheet.
The Etiquette of Motion
Humans read movement like a language. Doors that open too fast feel rude. Elevators that lurch make us doubt the cables. Robots are no different. The way they start, stop, and glide tells us if we can trust them.
Good motion is not just “go to angle 90.” It’s a story: notice, prepare, move, arrive, settle. That tiny “prepare” beat—the pause before the arm swings—is what makes a robot feel attentive, not twitchy. Think of it like the robot saying, “After you.” Your cat already understands this. Your blender, not so much.
Designers call this HRI—human-robot interaction. I call it manners in motion. When we shape speed and acceleration, we shape how safe and considerate a robot feels.

Hesitation, On Purpose
A planned micro‑pause before motion does wonders. Even 200–300 ms can signal intent. It gives human brains time to predict the path. When the motion begins, a calm ramp—slow at first, then steady—keeps surprise low and trust high.
We can bake this into code: wait, hint, move, settle. Lights can “breathe,” servos can whisper to life, and grippers can land like a feather. The result isn’t slower work. It’s smoother work that people want to be near.

Nerd Corner: How “Slow” Actually Works
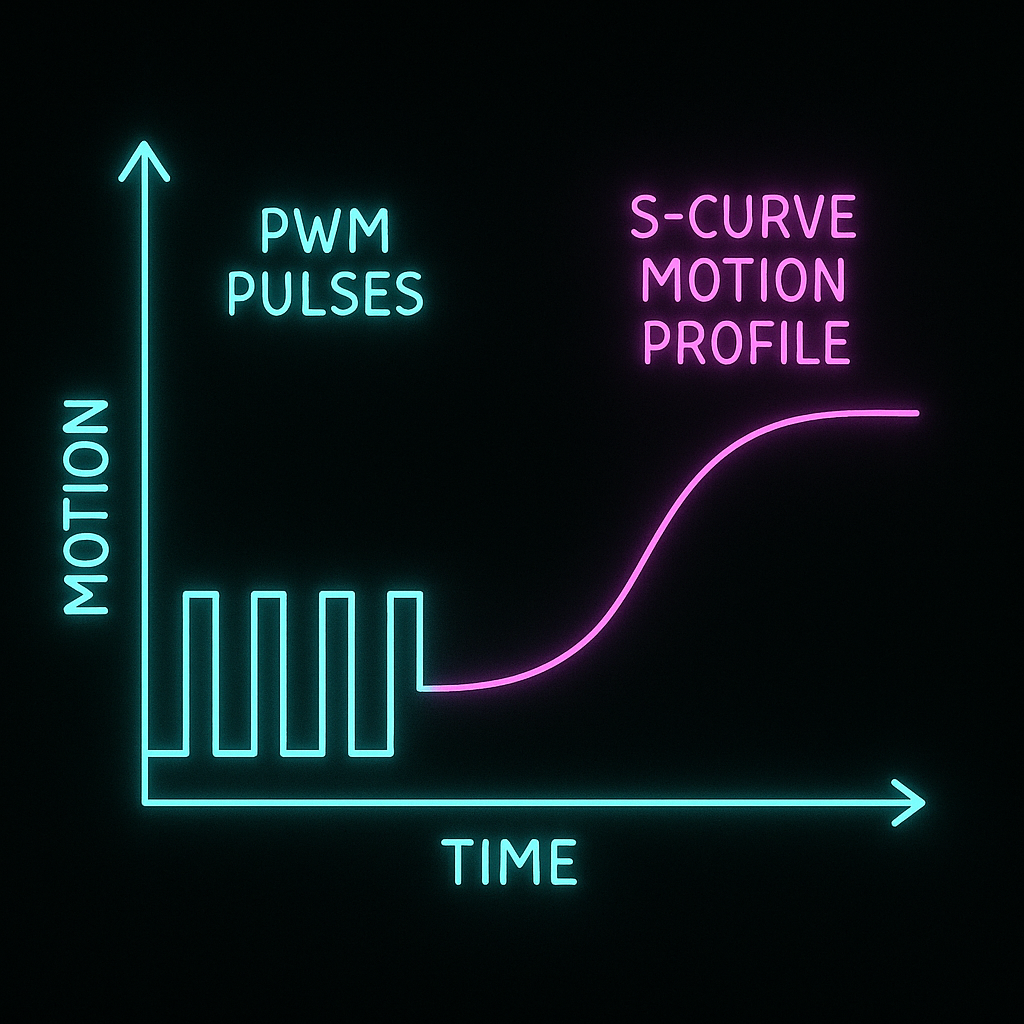
Servos listen to PWM—pulse‑width modulation. That’s a repeating electrical pulse where the width encodes the target angle. Think of it as a metronome tapping at ~50 times per second, and the length of each tap says “point here.” The “duty cycle” is how long the tap stays high in each beat.
Most hobby servos don’t have a speed knob inside. They jump toward the commanded angle as fast as their internal control (often a PID loop—proportional, integral, derivative, which chases error while damping wobble) allows. So to make motion feel slower and kinder, we send a staircase of small angle steps with tiny delays—ramp up, ramp down. That’s a motion profile. A trapezoid ramp keeps speed steady in the middle. An S‑curve eases in and out to reduce “jerk,” the change in acceleration that our bodies really notice.
This is why “slow” isn’t lazy—it’s precise. You’re shaping velocity and comfort at the same time, in software, with math so friendly even your coffee can follow it.
The Day Speed Became a Dial for Empathy
In Synthiam ARC, you can tune this feeling live. Add the Servo Speed Robot Skill and pick a servo port. Slide to try different ramp rates while you move the joint with a standard Servo control. Lower numbers go faster; higher numbers smooth things out. Initialize the servo position first, and if you want the speed set on connect, use the Connection skill with a ServoSpeed() command in your init script. Simple—and yes, the setting is meant for testing, so don’t forget to store your final behavior in your script or logic.
Real use: a mobile bot that slows its arm when a person is close (using a depth sensor), then speeds up when alone. The emotional result is huge. It feels like the robot notices you. That’s not magic. It’s timing, in degrees and milliseconds. Your robot just learned to say “excuse me.”

Where Synthiam Fits: Making Pace a First‑Class Control
ARC treats motion feel like a real design surface, not an afterthought. Robot Skills give you building blocks for timing, sensing, and logic. The ARC engine talks to EZB hardware to generate those PWM signals with reliable cadence, while your scripts orchestrate ramps, pauses, and profiles. The community shares patterns—from gentle grippers to safer mobile bases—so you don’t have to reinvent the S‑curve.
Use Servo Speed to explore the sweet spot, then bake the profile into your control loop. Pair it with sensors, and let context change motion: quiet in crowds, brisk in empty halls. It’s empathy, compiled. And it starts with a slider.
So here’s the real question: if movement is meaning, what should your robot’s first pause say to us?

At a Glance
- Polite motion builds trust and clarity.
- Shape speed with PWM steps and delays.
- Use ARC’s Servo Speed to prototype feel.
- Ramp with S‑curves to reduce jerk.
- Initialize position; set speed on connect via script.
Key Thought
A robot’s safety isn’t only in sensors—it’s in how gently it tells you what it will do next.
Big Idea
Treat speed as dialogue. With ARC Robot Skills, timing becomes part of your UX: slower near people, faster in open space, always predictable.
