Rod
Country: USA
Member Since:
correctional seargent
Achievements

-
 2015-04-30 - joined Synthiam
2015-04-30 - joined Synthiam
-
 2015-05-07 - connected ARC to the cloud
2015-05-07 - connected ARC to the cloud
-
 2015-05-12 - joined your first forum discussion
2015-05-12 - joined your first forum discussion
-
 2015-05-19 - created first new question
2015-05-19 - created first new question
Latest submissions
Questions (1)
Robots (0)
Skills (0)
General (0)
Hack Events (0)
Tutorials (0)
Apps (14)
Firmwares (0)
3D Parts (0)
Feature Requests (0)

No general conversations. Click here to start a conversation.
No robot skills. Click here to view the Robot Skill Store.
No Synthiam robots. Click here to view the featured robot projects.
No live robot hacking sessions. Click here to view the past live robot hacks.
No user tutorials. Click here to view all user tutorials.
app
Robo Cop
Human robot can talk with you and do tricks
Rod |
app
Sabertooth Ramping
Sabertooth ramping script example joystick button mapping.
Rod |
app
D.Cochran Teddy - Database Driven Robot EZ-AI Combined
Please see thread at http://www.ez-robot.com/Community/Forum/Thread?threadId=7220 for extensive details. I will...
Rod |
app
Halloween G-Bot
V1 G-Bot Halloween Configuration 10/31/2014 12:24 p.m.
Rod |
app

JD With MPU6050 Accelerometer
This JD example uses the EZ-Bit MPU6050, which is an accelerometer, gyro and temperature sensor available in the ez-robot store. The script Update Gyro is called...
Rod |
app
QR And Glyph Navigation
This script is a simulation of Roli moving from room to room when asked for. To use this script you will need something red so the camera will react to it when asked for. You...
Rod |
app
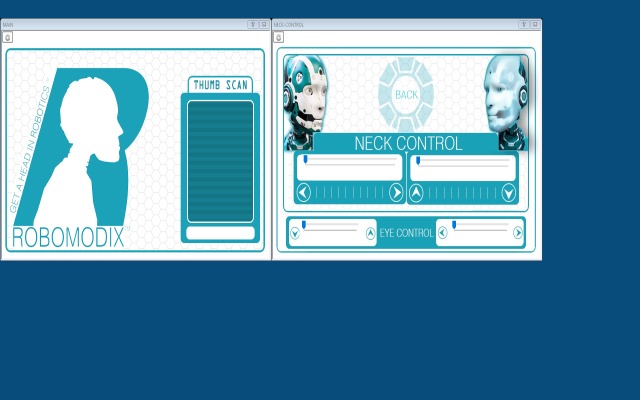
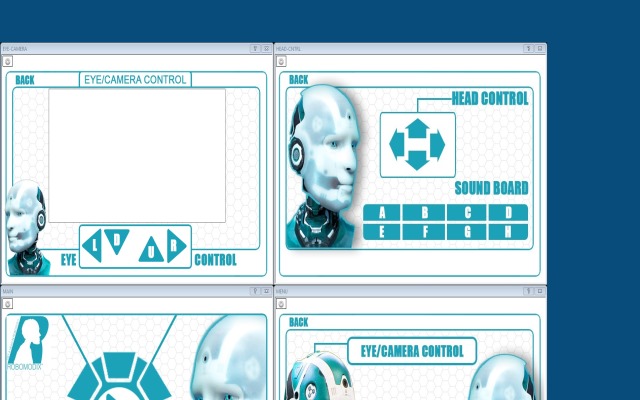
Multi-Window-Example
Thsi is an exaple on how you can make your app look more polished and add more control.
Rod |
app

ALAN-V3
rOBOTIC HEAD
Rod |
app
ALAN-V2
rOBOTIC HEAD
Rod |
app
ALAN-V4
rOBOTIC HEAD
Rod |
app

Six2
This is the EZ-Robot Revolution Six example starter project. There is a great tutorial course on our website at www.ez-robot.com with information on getting your Six up and running.
Rod |
app
ALAN-V1
rOBOTIC HEAD
Rod |
app
NAO JD
A NAO JD using the head created by Adolph Smith. This project was built off the original EZ-Robot JD project.
Rod |
app

Six With Distance Sensor
This project uses a distance sensor, extension cube and rotation servo to give Six the ability to avoid objects. Avoiding objects is done by using the Ultrasonic Radar Scan...
Rod |
No firmwares. Click here to view robot hardware and firmwares.
No 3D printable parts. Click here to view 3D printing robot library.
No features requests.