

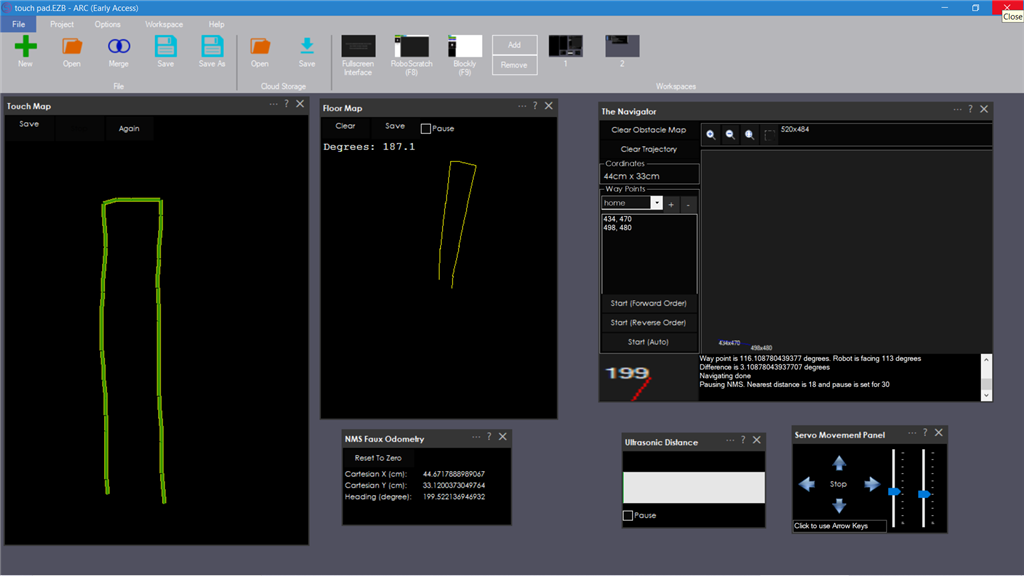
I am using the Floor map and Touch path maps and the Navigator, for simple path following - I am at my farm, on a hotspot and dangle with an IoTiny
my car follow it very nicely
Video will follow soon
For actual navigation with way points, you need one of the Intel Realsense cameras
EzAng
By EzAng
— Last update
Other robots from Synthiam community

Tmesserschmidt's The Vision (Marvel) Robot Replica
Using a mannequin, a Vision robot costume, a hacked Elvis Alive bust, some servos and an EZ-B, I am building a replica...

Ezang's Happy Crawler 5/18/2021 And New Combination Robot...
Metal legs adjusted to walk A short Video for now, Servo City Parts, 4 servos, ARC programming - IoTiny, Battery,...
Sudo's Project Shogun
Ive started work on my humanoid once again, and this is the thread where Ill share all of my discoveries and such with...

Nice ezang, waiting for the video!!
EzAng, That looks good. I wonder how it would work with the new NMS Faux Odometry and the Navigator, maybe you could set way points once you have your robot setup?
I plan on testing this all soon, thanks for viewing
Touch map is going great, fine tuned it for navigating back to me, the NMX faux odometry reads well which corresponds to the navigator's readings - can't do a video now, at the farm, try in a few hours in a city :-)
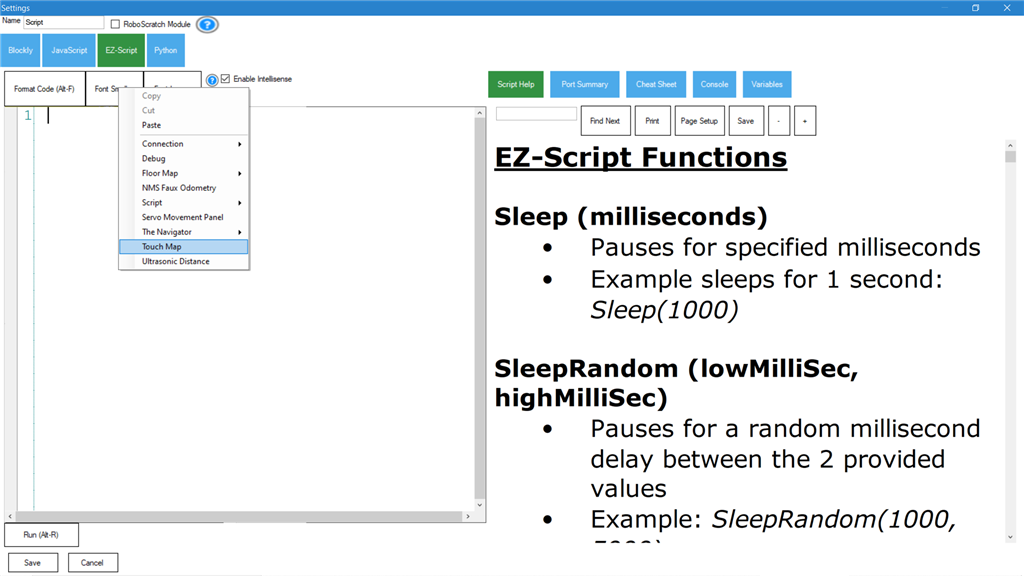
I notice in touch map, when I go to ad code there is no way to add any code - same with the ultrasonic sensor
Here is one video for now of the touch pad, wish I had a way to make way points and can label them, maybe one day
more to come
Use The Navigator if you want way-points. That’s why it exists.
For pose telemetry, use the Faux Odometer robot skill combined with The Navigator.
EDITED: I was working from memory. After looking in ARC I changed my answer below.
Very fun stuff. Amazing technology. How much easer can it get for us! LOL
EDITED: never mind. I didn't know what I was talking about. LOL.
Hi Dave, I don't know what you are talkin about either :-(
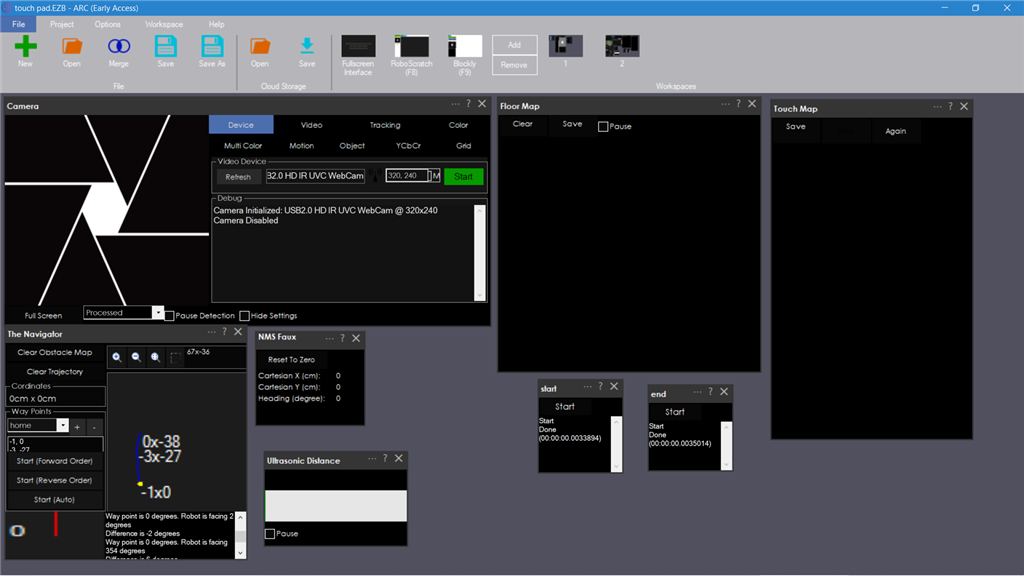
Here is my new video with the touch map pad, floor map, and the Faux Odometer with The Navigator
comes right back to me :-)
using a Iotiny, battery, robot car I made with parts - Ultrasonic sensor and a camera
You will have to fine tune your touch map and floor map for your own robot car
EzAng
Thanks Justin and Nomad for your email comments
This popped up in my memories today. It was a good project!
You know I tried using the touch mapping skill with my huge outdoor rover at the cottage, but was not accurate enough, It would ram into trees and the parked cars,boat LOL! It needs all the sensors active to not hit stuff so I believe a Lidar map would be more accurate in future tries outside.