
I designed IQ as a proof of concept robot.It is made of foam core 5mm thick board with .020 styrene plastic sheet overlays. He is 4.5 feet tall and can telescope its head another 8 inches using a camera tripod with motor drive. There is a windows 8.1 tablet installed on its chest. Power comes from a lithium battery pack for drive wheels and a 12 vdc sla battery for the electronics. The EZB 4 is connected in client mode. It is designed not to tip over with anti tipping brackets beneath the lower frame..The movement speed is moderate for stability. The arms are from a Robosapien that i received that did not work.I gutted the arms and installed 3 servos for each arm .It can rotate its arms ,elbows and open and close hands.








By rb550f
— Last update
Other robots from Synthiam community

Ezang's My New Update Arm Robot 11/14/2019
My new update to the Robot arm, added a 5th servo to the gripper - using auto-position - Ez builder software and Ezb4...

Mstephens's Robomower To Be Transformed With Synthiam
This summer I am hacking my old RL 500 Robomower and turning it into an autonomous robot using the EZ-B. I started the...

Joseph4760's Wall-E To Wall-E-Nator
I picked up a Wall-E U-Command many months ago, and started the disassemble, but as usual life got in the way an I had...

Dude, sweet... Nice design!... Can't wait for a video....
Can't wait for a video....
Craftmans ship and design are excellent! Very nice job. Man, there is a lot of talent peope on this forum. :)
@rb550f, With that type of material does the lighter weight help with maneuverability of the whole bot ?
I can't see the wheels!
The weight of the robot is about 15 lbs with batteries. The super structure is the aluminum camera tripod i picked up at a garage sale...Using the foam boards is easy but very time consuming measuring and cutting.But the cost of the robot body is very low..Also here is a pick of the remote I am using with EZB. It is 2.4 ghz wireless.Got it on Newegg.com. Even has and mouse and touch pad,perfect for robot control.It is quite small and has lithium battery. .
Windows 8.1 tablet give me all features you can do with EZB software.Even has hdmi if i want to connect to big screen or mini projector...
.
Windows 8.1 tablet give me all features you can do with EZB software.Even has hdmi if i want to connect to big screen or mini projector...
What is the best robot for me? My birthday is coming up and I want a robot instead of a party. My parents said, yes. I am going to be 8.
P.s. Hi, I am his mom. I am here with him.
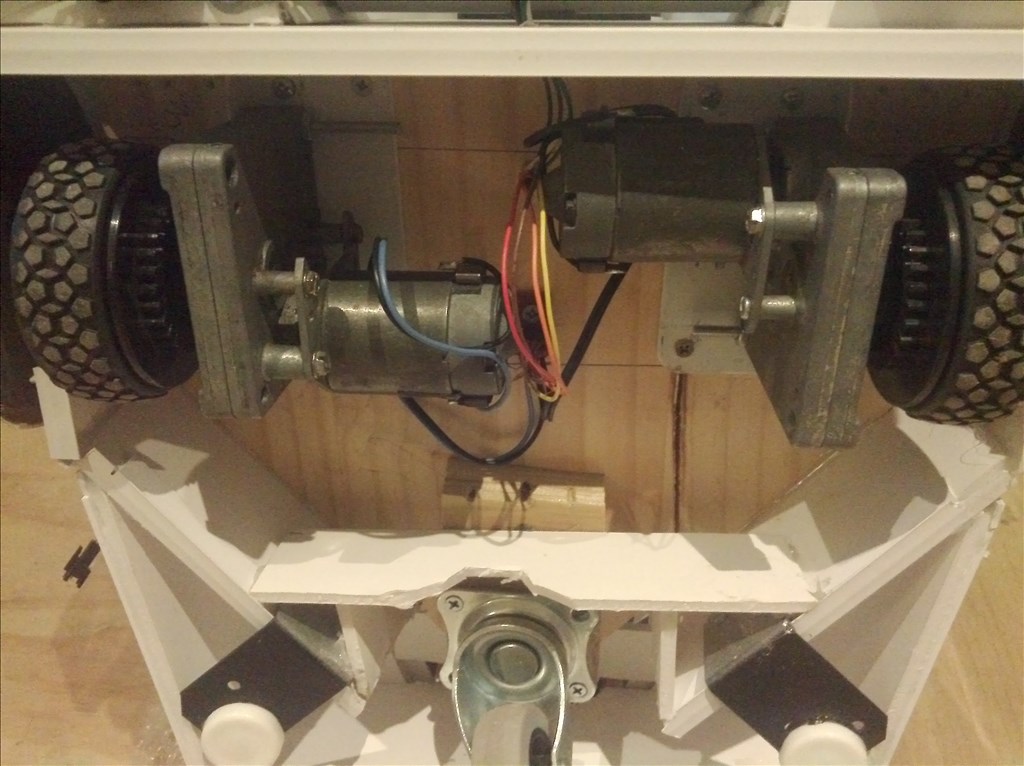
Thank you all for the positive replies. I uploaded pick of robot drive train. Great to be part of this community. . Note I use metric measurements when cutting materials for a better fit..
. Note I use metric measurements when cutting materials for a better fit..
Thanks for letting me see the wheels.
I am not sure what robot is best.But one using EZB 4 makes the best robots..What type of robot are you wanting to make?
@alankoenig If you and your mom are tech savvy (good with computers) then perhaps one of the EZ Robots might work... Roli, Six or JD...
If you are new to robotics.I would definitely recommend one the of the revolution robots...If you really want to be creative you could build any robot size or size using foam panels cut and glued together...Dont know if your mom would let you use hot glue gun....You built what you want and then control it with EZB 4 controller..Let us know (community) if you require assitance for build. Lots of great people on this site with many skills and talents.
Thanks for the ideas. I think I will start with Six, or Roli.
RB550f Great concept robot. I can see you put much time into your project. I remember the cool large foam robot you made with your grandson. I like how you fit servos into the Robosapien arms. Looking forward to videos. Steve S
Steve s Thanks for the reply.It took 3 months to cut and glue and trim all body parts.I do not have a 3d printer,but I like creating parts with my own two hands. And thank you for remembering about the foam robot i made. It is nice to be appreciated.
@rb550f That's a good lookin robot ya got there! I was intrigued by your drive motors. I have 4 just like them that I got 34 years ago when I was working on one of my first robots. It was a Unicorn 1 that was being featured in Radio Electronics magazine. I still have all of the magazine articles that covered how to build the entire robot step by step and where to order all the parts.
I have been thinking of using them again in a new robot I am planning. :P
@rb550f, That is a brilliant looking robot, it looks so neat with all the illumination!
Tony
I would love to see more pix from the beginning. You have done a GREAT job on this!
@RGordon, You worked on a Unicorn One? So did I. That was Neat looking but not very functional. Small world.
Mel
seems like a million years ago Mel
:D :D
:D
Yeh, it seems like it was, I guess, 1972-1976, I don't remember. My first son was born in 1970 and it came when he was a little boy because I bought a metal lathe to work on that project. He and I worked on it together. Oh, it he was 5-7 so that would've made it 1976-1980 maybe. I don't know. We had a lot of fun with it.
Sorry. I wasn't trying to steal the thread. You have developed an Extremely nice robot.
Mel
Great job! May I ask where did you buy these drive trains ? Or the specification. They look like exactly what I need right now...
I got those motors at a surplus store.I believe they are Brevel gear motors.
I know I'm late to the thread but I have to say your project looks pretty sweet!
@rb550f.
You say it took you three months to cut and glue the panels for IQ... well, It shows. You have done a really great job with a clean build and ended up with a fantastic looking robot. I also really like the lighting you have going on there, especially the blue lighting strips. It really adds the extra "coolness" to the overall design. If IQ is a proof of concept, I really look forward to what you do next.
100 "Cool" points for you sir. :)
I second that!
IQ is very cool nice job! @tevans I got a pair just like that from Herbach & Rademan (link below) but I don't see them there now. But they have some similar ones.
www.herbach.com/Merchant2/merchant.mv?Screen=CTGY&Store_Code=HAR&Category_Code=DCGEARHEAD&Offset=10&Previous_Stack_Depth=1
@rb550f,
Any specs you can provide on the Windows 8 tablet? I'm looking at either a fanless pc with a small hdmi monitor, or a tablet as an onboard computer. Would be interested in knowing what you use and if its robust enough for your purposes.
Thanks,
John
I use a PIPO W4 8 inch tablet with Full Windows 8.1.It has Hdmi output and runs EZB software very well.Quad core...Excellent graphics..Purchased on EBAY for less than $100.