
Hey Everyone - happy new year!
I figured I would share some of my hilarious progress so far, having received my dream gift for Christmas... an EZ dev kit! I also have a few really silly questions from the admittedly uneducated.
First of all, here are a few pics of what I have slapped together to this point (hopefully this works):
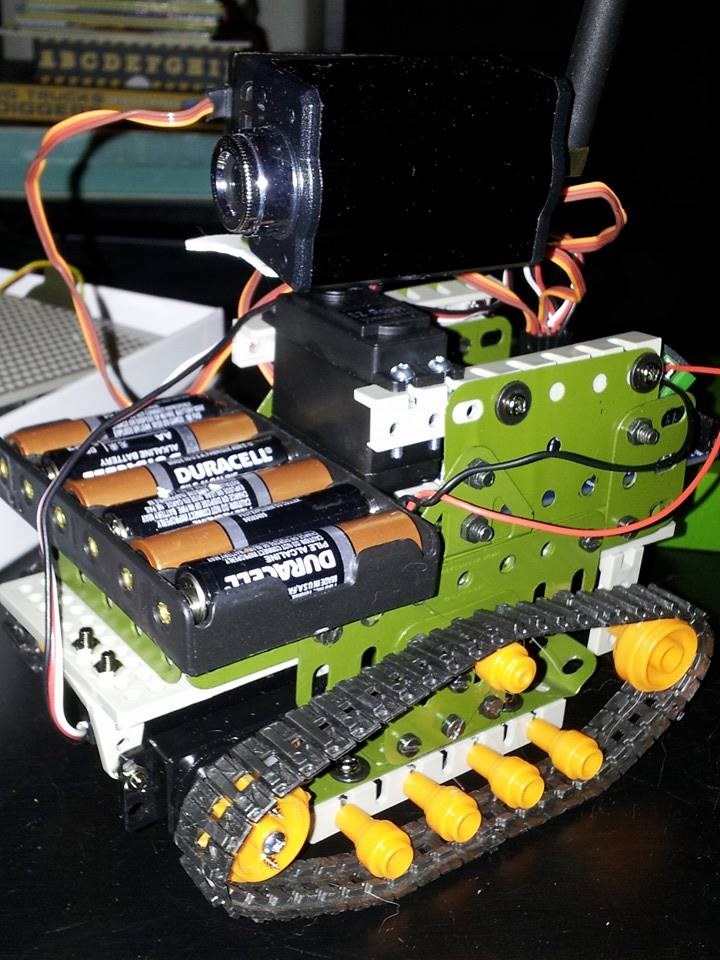
My first crack at it, A tank just run off the bluetooth using Tamiya track kit and some old Meccano, having the continuous servos run opposite sides to keep the width minimized. It really, really sucked, and the tracks kept popping off. Everything was tediously screwed together, which created problems with alignment. At least I knew the board and everything else worked great!
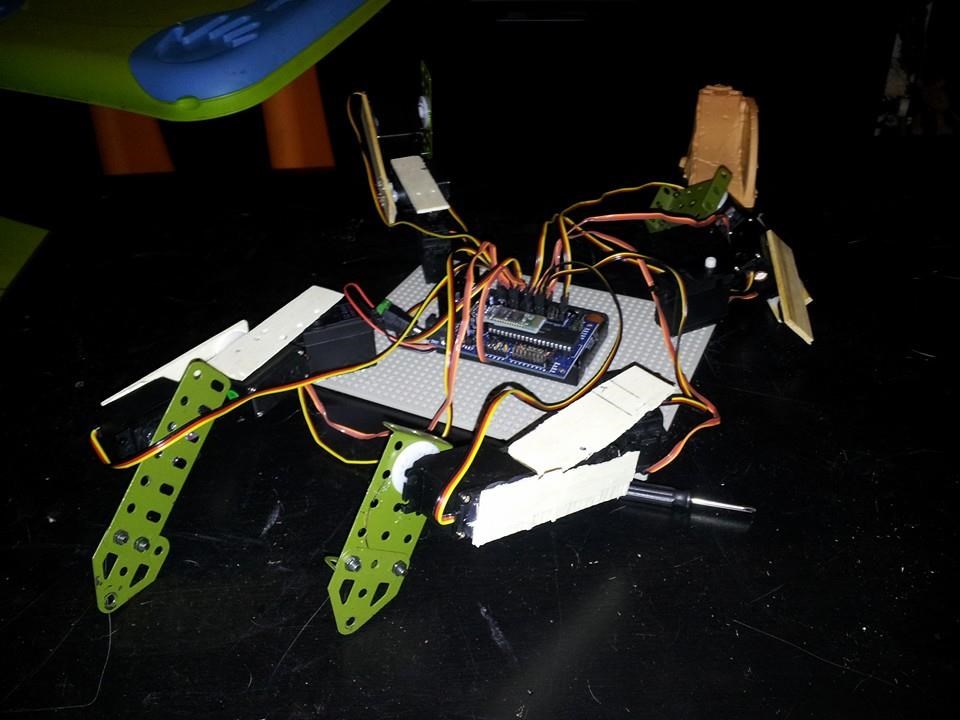
Then I decided that I wanted to try a quadripod. Boy did THAT ever not work out. Tiny strips of hobby plywood were useless, mostly because I think I had consumed too much beer and turkey by the time I came up with the (horrible) design. The plywood had zero torsional strength, and the leg size was too great a load for each servo.
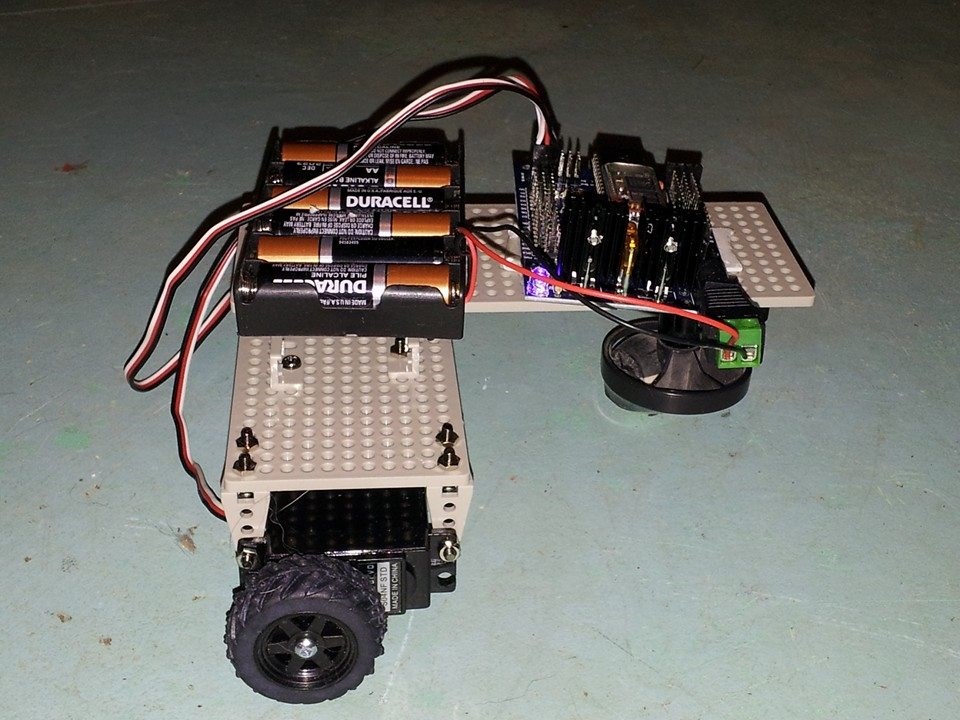
I then slapped some more Tamiya junk together, and stole a castor wheel from one of my nemesis, the evil roomba. I felt violated by the amount of dust and detritis I had to dig through to get this one piece, knowing that I had bought it from someone a few years ago in Calgary (they are generally much dirtier than Edmontonians). Of course it worked though, it was just boring to even look at, and I realized how slow the continuous servos were as direct drive.
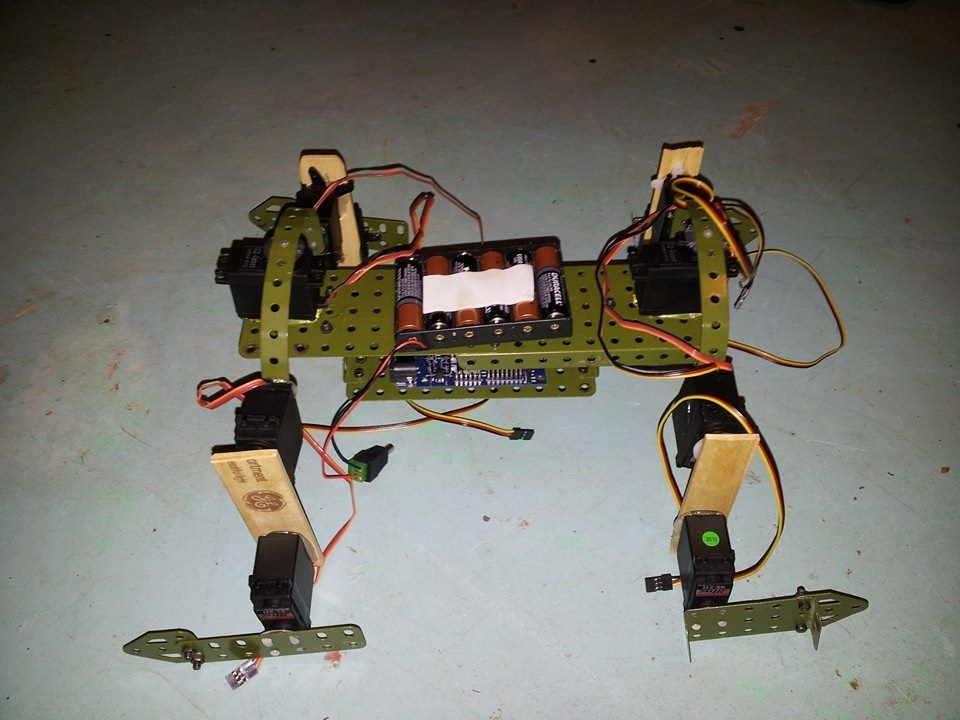
I then did some research on animal gait, and came up with something I liked for a quadripod (I still didn't have enough servos for a hex). I doubt anyone would guess what this piece of junk was modeled after, but don't worry about it too much because it definitely did not work. Not at all. Servos had nothing, and I began to feel that the battery pack weight was really dicking me over for the legged motion.
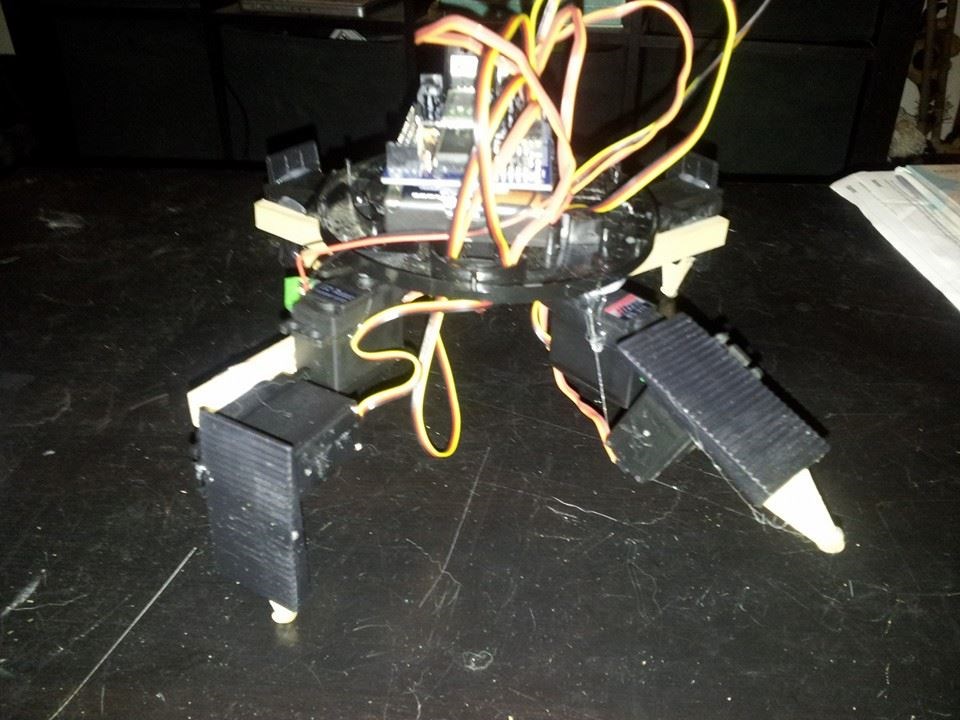
Finally this morning I slapped this thing together, a 2 DOF quad, using hobby spruce and baseboard spacers, wood triangles for the toes with that hobby glue for traction on the tips, and of course another excuse to ensure the roomba never sees daylight - the top center cover makes a fine baseplate.
It works! I can lift one leg!
So now I am coming up with how to program gait for a quad, but there is still that nagging question - can I use a LiPo battery, and if so, where do I hook it up? Straight into 5v and Gnd? Do I just cut the connector off and use the barrel jack or whatever it's called? Will the LiPo I have kicking around burn out my board or servos if I just hook it up in this fashion?
The battery I have is out of a blade CX3, I will get back you on the actual size, but it is a 800mah 2-cell 7.4v. Tiny and light compared to the battery pack that came with the EZB-3.
Let me remind you, I am literally a rube when it comes to pretty much everything to do with robots, I know nothing about programming (I can learn, especially with the EZ builder), and less about hooking up different voltages (aside from understanding that I have a knack for blowing things up accidentally).
Other than that, has anyone got any good gait programming or advice for quads? I think I'm going to start with the regular 3 and 1 free as opposed to 2 and 2.
I can let you all know how it goes if anyone is interested, but until then if anyone knows of strapping a LiPo straight in I'd like some advice. The reason I am looking at this one is that I have an actual charger!
Other robots from Synthiam community

Zxen's Robomannequin
Kleinjd's 17 Servo Biped (Formerly Robonova)


Ha! What a fun post. Congrats on the new kit Santa brought you. Looks like your having a blast.
Yes you can use a LiPo battery. Just make sure the battery voltage is between 5 & 17 volts and the amps it capable of delivering is better when what all your motors pull when added up. You wire it right in the same place the supplied battery pack was (at the barrel jack). Make very sure you have the positive and negative on the proper place. People have wired it backwards and burnt out parts of the board.
I've never used one of these LiPo setups but they are discussed often here. You can do a forum search on the topic or just wait for someone else to chime in with more info and things to look out for (like over charging).
Some things are hard to find on this form so here's a link to the Technical Manuel for the EZB Board. It's a good read:
EZB Manual
Welcome and keep having fun! Dave Schulpius
You can power your EZ-B with the LiPo. The EZ-B V3 has on board regulators that can handle up to around 17v so a 2S LiPo is fine (I use them myself). Use the barrel jack.
Thanks Dave! I actually tried to find something like that but obviously I wasn't looking too hard...
I did notice a few posts about LiPo setups, although they seem to focus on voltage monitors and regulators, which then confuses me to no end. Yet more knowledge required on my part.
I'll give the LiPo a shot and see if I can avoid frying the board!
Until then, you`re right, I am having a blast! This is the best fit for my creative itch I have seen in a long time, and I am already dreaming up new things to do once I figure this current walking thing out!
Exclamation point!
Thanks Rich! I think that two votes is enough for me to give it a try!
Wow, tons of help, and super fast with this community, ha ha.
For an update on the craziness I have been enjoying with my EZ-B:
It's been having fun using the LiPo to power it - way lighter and easier to manage.
I have given up on the quadruped robot - the walking I am able to manage with my cheap servos is truly shameful. I will return to the idea in the future when I have more disposable income to shell out on a nicer setup.
I have returned to the tank chassis idea, having rebuilt a Tamiya kit and put it to good use after realizing I had a Solarbotics (Calgary company?) motor driver, and paying close attention to Rich's H-bridge tutorial and using the examples he has up. The thing is fast and literally climbs over anything!
I loaded up the Android app and have been using it to entertain my kid with the little tank as an RC, as well as impressing the woman with the fact that I managed to build something that seems complicated.
I then attempted to sort out some sensors, because of course I wanted something interesting and out of the ordinary. I've spent the past few days pulling out my hair over it, and will just be hooking up the regular stuff that came with the dev kit (the camera is a bit intimidating, but I suppose I will have to learn).
And for the big news, I picked up a completely outrageous new platform for a yard bot... an old 1/6 scale RC tank! Apparently this guy on kijiji had a Stuart M5 tank made by 21st century, and when I called him he explained that it wasn't working due to battery issues, and he was basically throwing it out. Obviously I grabbed it, threw some cash at him for good measure, and now I have a gigantic tracked chassis that runs off of 12v! I was looking up the manual on the net and found that these things go for around 600 clams! Good investment, as I could always sell it for a million percent profit.
The next surprise was charging one of the 2 batteries the guy gave me and finding out that the tank worked absolutely fine, other than being annoyingly loud and quite silly. Here's a pic I just grabbed off the net:
So obviously big things are to come, lol!