

Trying to find the optimum solution for a robot that uses all the pieces in the development kit.
I am leaning towards a Fork of Zowi / Bob / Otto, the little open source creative commons (supports commercial license) biped robot. It has 4 servo's on the legs and there are some forks that have servo's for arms. What it lacks is a decent brain as it is arduino based so it can only do basic moves so I think the EZB would add a lot of value.
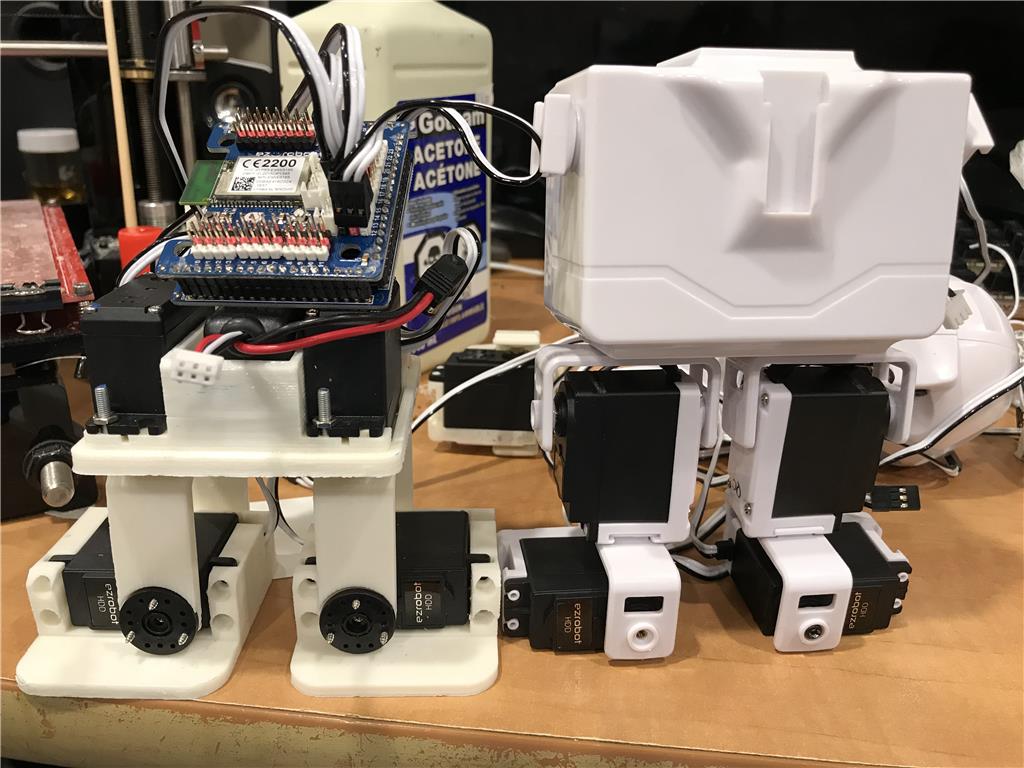
I printed a Zowi off and it looks like it is fairly close to what is needed.
Logic is use the existing HDD servo's for legs (2 Servos for feet and 2 for legs). They fit perfectly into the Zowi legs.
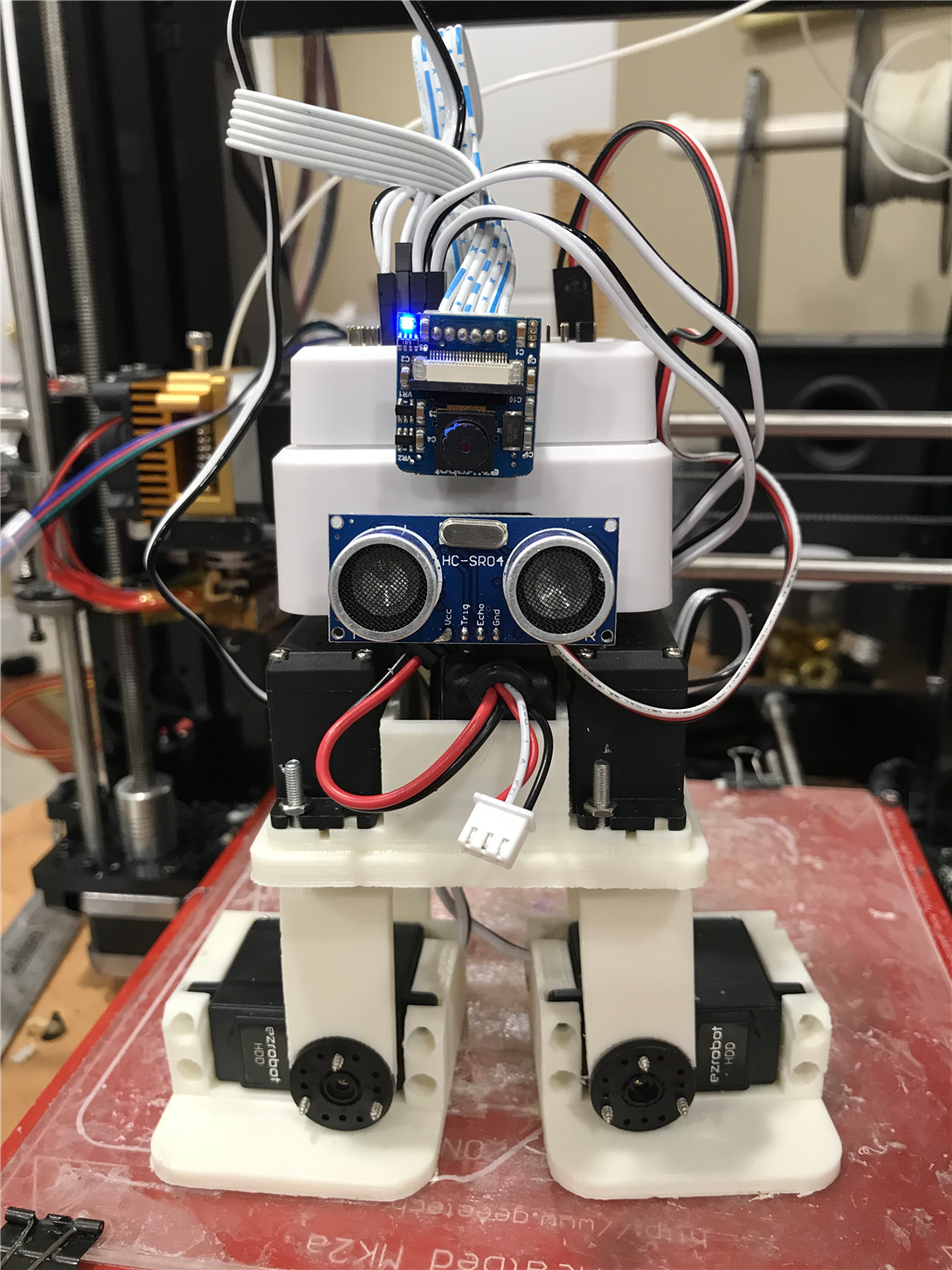
Use the 2 full rotation servo's for arms and add the camera and distance sensor.
Looks like the only major change will be the chassis design so it can fit the top of the EZB V4 and create some arms but the legs are pretty good and fit servos and the battery holder fits one of my 2S lipos.
Other robots from Synthiam community

Jstarne1's Omnibot 2000 , Rad 2.0 Vacuum Bot
Mickey666maus's Oled Animated Eyes For ARC Pro And ARC Free


That looks cute! I've never heard of Zowi before, pretty neat! The full rotation for arms though...I'm not sure, unless you really want them to spin around and around?
"The full rotation for arms though...I'm sure, unless you really want them to spin around and around? "
I kind of figured if the arm only has 1 servo each it is not going to do much anyway. Good for dancing and hand waving, The 360 servo's are the only things left in the box after building a Zowi. I guess both servos could be combined to make a 2DOF arm but without a way to zero it I am not sure it would be much good anyway. I wish I had some CAD skills as I am struggling here with sketchup trying to design a nice chassis. I am in learning and failing mode at the moment.
Oh BTW here is a ZOWI
That is one cool little robot ! Fun to watch.... Put a propeller, a wind up key or a cool spinning hat on his head for effect, then only one CR servo left.
Thanks for sharing.
P.S Great IO Tiny project.
Yeah a spinny hat maybe a good idea. Not sure what to do with the 360 servos. In process of adding a robot arm to 4 of them. For what purpose I am not quite sure.

very nice robot for learning,like how the horns are made.3 screws. also diff colors .
Struggling with writing the walking gait for this guy. I am trying to use the custom Movement Panel to do a forward, backwards, left right. I will give the guys who wrote the gait for Zowi points this is really hard to get this guy to go the way you want and do it smoothly with only 4 servo's. I am using Servo(port,position) and shifting 1 server at a time (foot up, turn leg etc) and then a short sleep before moving another but is quite a challenge.
I am wondering if I should try writing some sort of machine learning script with the sonar. Try moving a foot X degrees and a leg Y degrees and then the same on other side. Check distance after 10 steps, see how far I get. Now walk backwards to starting point and try again increasing foot say 5 degrees up or down etc until you get the fastest walk.
Any pointers?
For the walking gait - use the Auto Position control. Nothing beats it and will take less than an hour to create... Read here: https://synthiam.com/Support?id=180
and will take less than an hour to create... Read here: https://synthiam.com/Support?id=180
Also, watch this: https://synthiam.com/Community/Tutorials/97
And this if you want to make the robot dance once you have a bunch of actions and frames: https://synthiam.com/Community/Tutorials/52
The learn section has more activities as well.
thanks for the pointer @DJ I guess I should have looked for that tutorial before I started writing dozens of lines of script :-) I think I will save this for another night. He can hobble along now but It's not pretty. It wasn't until I actually stood up and tried to walk like he would with only 4DOF that I started to understand how to propel him along and turn him.
Is there a video of you walking around like a 4 DOF robot? haha!
bioloid battle droid has same config.maybe you can check it there
is this a zowi robot ?
Yep with a new app. The thing I like about Zowi is it is Creative Commons but allows conmerical use. It easy to print and easy to integrate with EZB tiny (or an ezb v4.2 ). So EZRobot could put a robot together for an affordable price 4 Servos and ezb that I think would appeal to children. Easy to build, ez to program.
they are cheap to.by one and do a ezbv4 make over. :D
@Nomad6R where can I buy one?
found it on Amazon $69.... after Christmas
If anyone upgrades it to EZB, please post
Frank
here and free chipping blue/yellow
zowi robot
Not sure what pre order means? Is that like going to a bar and getting handed an empty glass with the promise a passing inmoove may fill it.?
here is Amazon's ship date
nink
pre order means if the maker has enough clients to make the robot and to, start the assemble line.if your lucky you have a robot in maybe a year. dont contribute on stuff like indiego.its a rip off.
@Nink Since you built the 3D printed version and used EZB HDD servos, could you look at the retail version specs and figure out if EZB servos would fit?
Thanks, Frank
@Nink Thanks for sharing the info on your printed as well as the retail version of the dancing robot. My grandkids got so excited and I just had to see if I could build one completly out of EZ-Robot parts
Using JD bare project as a base, create a Cubee robot using only EZ-Robot parts. I think this approach would help in STEM education as standard EZ-Robot parts were used. I used @DJ tip on AutoPosition to create dance moves
The only servos used from the JD Cubee build are: D12, D16 Hip joints (replaced with rotation servos) D14, D18- ankle joints
The goal is to edit the frames and actions in the JD AutoPosition control to create the desired dance moves
Optional Try using standard JD feet as the ankle joints. The feet would provide great support but add an extra servo(there are 2 servos in each JD foot) that could also be used to lift a leg (D14, D18)
When I edited the AutoPosition control to add in my new dance moves, I was not able to get the servos to respond to the frames or actions. I’m not sure if this is what fixed it, but since I was only using 4 servos out of the 18 in the JD bare project, I wondered if the frame was trying to communicate with all 18 servos
So, I assigned all unused servos to NA. My frames and actions are now working, but I’m unsure this is what fixed it.
I only built 2 Actions; Ankle Flex and Twist. As you will see in the video, I have no rhythm or style but this is just a proof of conceptthe exercise is left to the student
One feature this design has over the original Cubee is the standard voice recognition built into the ARC. My granddaughter nicknamed the robot floppy guy because he was failing all over the place with standard JD Actions.
Here is the video
If anyone is interested, I can post the project
Frank
Nice work. Think his feet may need to be a little smaller to get him to walk. This could be a great low cost entry level bot for DJ to add to his collection.
@Nink You are right about the big feet!
I was just worried about him tipping over on aggressive moves.
Since the JD body has built in arm servos, one could also add arms.
To keep the cost down for an entry level robot, DJ could remove those servos.
Thanks again for the inspiration on this new robot, my granddaughter loves it.
Frank
@Nink Changed to smaller feet and more moves
Regards, Frank
Way 2 much fun. I am patiently waiting for my Black Friday special to arrive and when it does I will play catch-up. Love it.
these are great moves.i like these video's
Frank, fantastic design!
BTW, Oh My GOSH, does anyone else think Frank's JD Cubee looks like a "Batteries Not Included" robot? As a child of the 80's I loved that movie and the "little guy".
@JustinRatliff, Thanks for the compliment. Your photo made me think of adding a head and in keeping with my self-imposed requirement of only using EZ-Robot stock parts here is what I came up with:
This of course makes him pretty tall, getting away from the Cubee clone idea, and he getting so top heavy that I had to use a bit bigger feet. Its almost as big as JD.
I'm considering removing the unused shoulder servos to balance it out. the Dodecagon Body is already enpty
It would be nice if there were some "slim" EZ-bits extension cubes, just male to male connectors for close fitting servos
Regards, Frank
@JustinRatliff, Here is my current attempt at matching those "Batteries Not Included" robots
I used the dome from AdventureBot and added music. Was able to go back to smaller feet and it has good balance
and the video
Frank
I love it Frank! Huge improvement! I'm probably going to end up copy catting you in the future. I might even do a custom shell.
@JustinRatliff Thanks for the feedback.
Would you like me to make the project public?
Regards, Frank
QB is awesome, frank. Last year i watched Batteries Not Included! What a great movie. Your robot sure looks like them!
I tried to build the bot Frank (I sacrificed JD) but the Poor guy kept face palming on me as I don’t have your blocks for feet and servos are to small. (may have to print some if they don’t turn up soon).
If you look at dev bot the Servos are mounted horizontally versus vertically so they can twist allowing him to walk forward but not sure we can do this on the JD Robot version.

@nick I’ll try your config with feet to let you know if he balances
Frank
maybe you can use this config.
@Nink I implemented your short leg design and it works great!
I also removed the unused servos in the JD body and Its very stable.
If you decide to offer your 3D print services through the EZ-Robot link I'll order a set
synthiam.com/Tutorials/Lesson/88
Thanks again for the idea
Frank
@Frank Nice work . You don't want my printing services, I would have to pay you. Did you not see my thread on me begging for 3D printing help. Multiple EZ Robot experts hand holding me and I still can't get a decent print job. I would blame the worlds cheapest Prusa I3 clone I use but other people have the exact same printer as me and their print jobs are amazing. https://synthiam.com/Community/Questions/10750