Compatible EZB Hardware
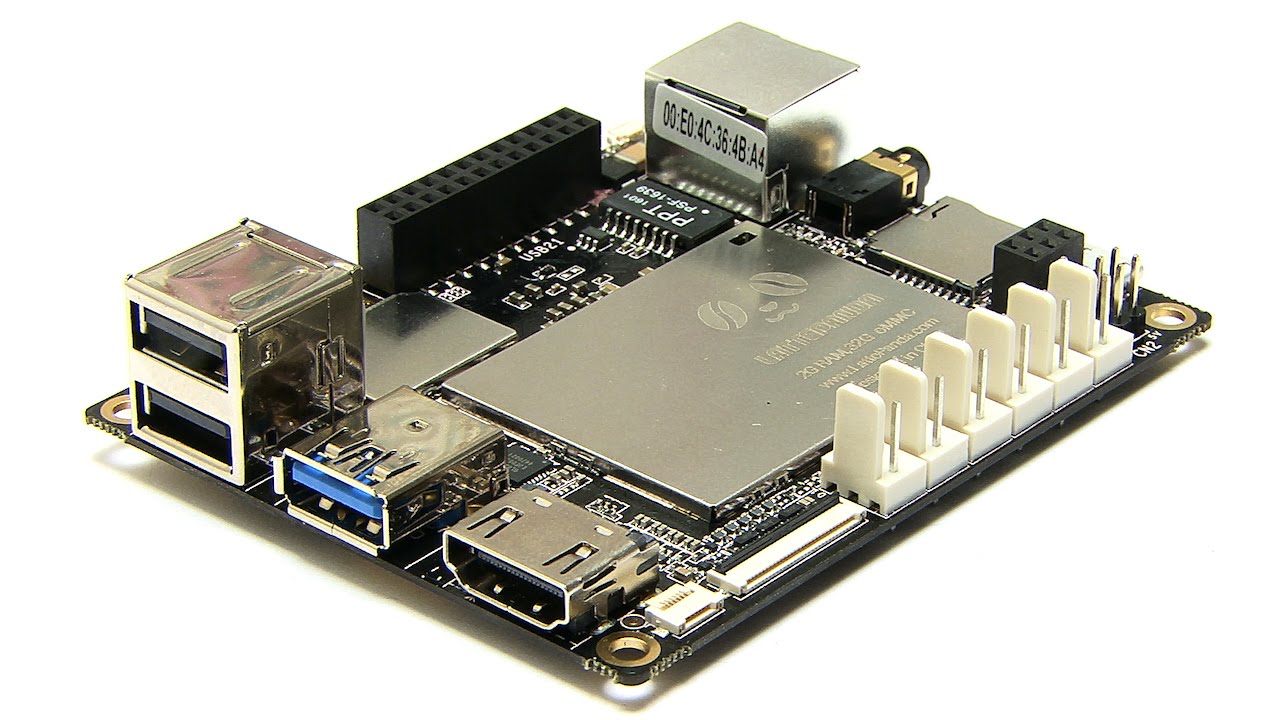
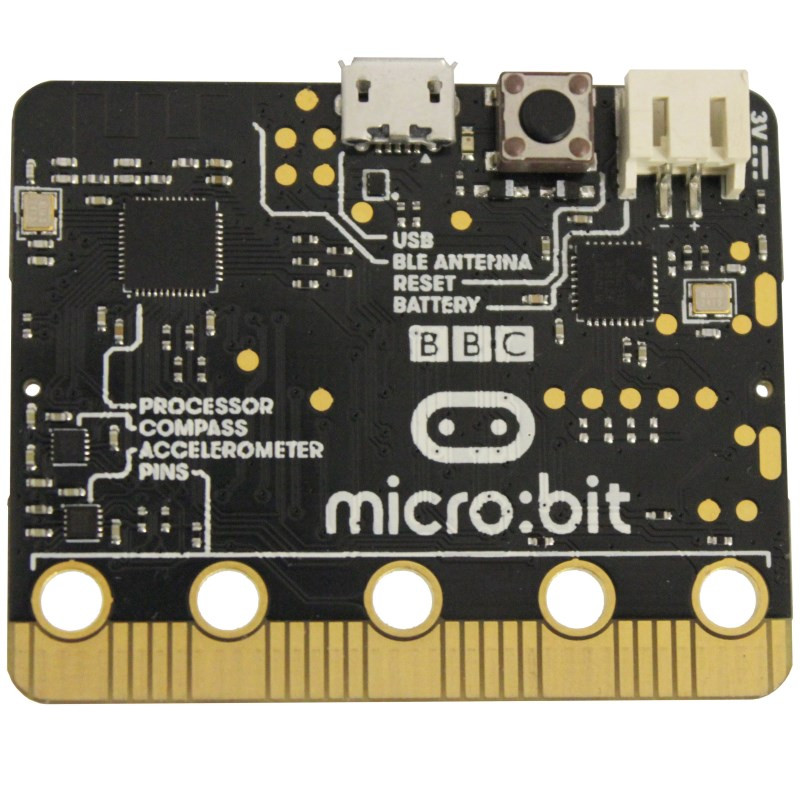
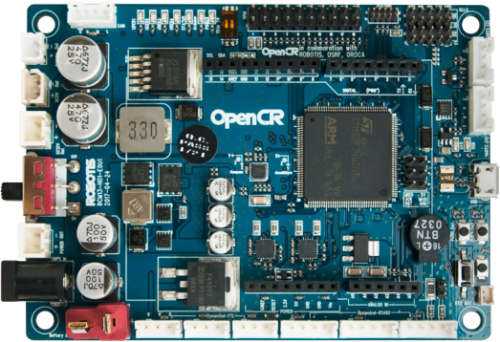
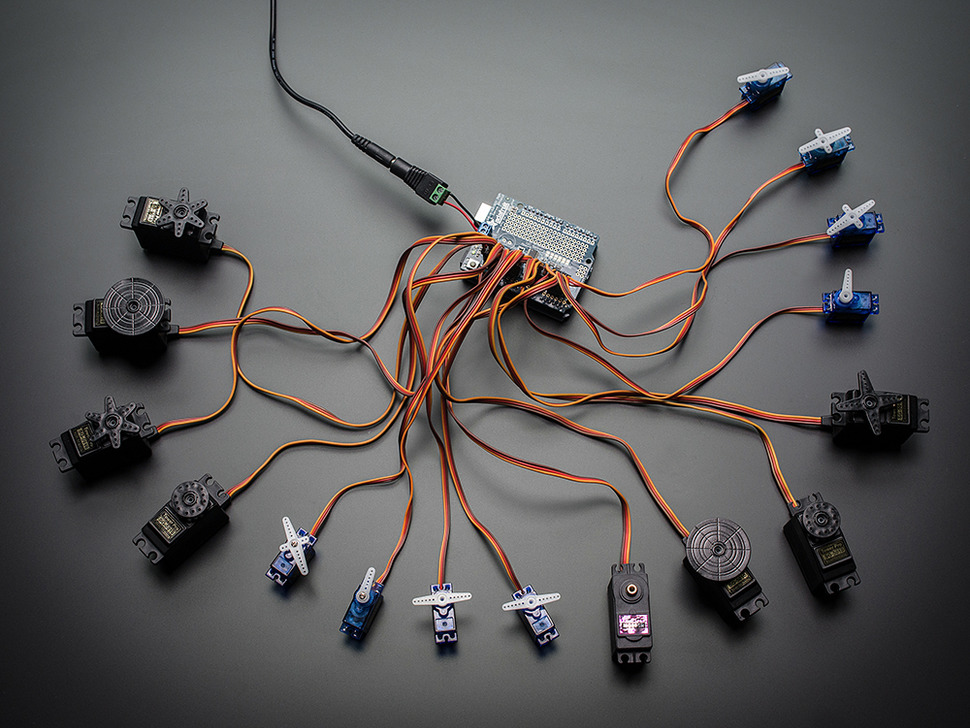
There's many microcontroller and developer kits available in the market. Synthiam has developed a variety of EZB firmwares that install on these devices to make them compatible with the ARC Robot Software. When a microcontroller or robot product is connected to ARC, it is referred to as an EZB. An EZB is any robot computer or microcontroller that accepts connections from Synthiam's ARC software to control servos, sensors, and more.
Compatible EZB Hardware List





















Didn't find the robot hardware you're looking for? Let us know