PCA9685 Servo Controller by Adafruit
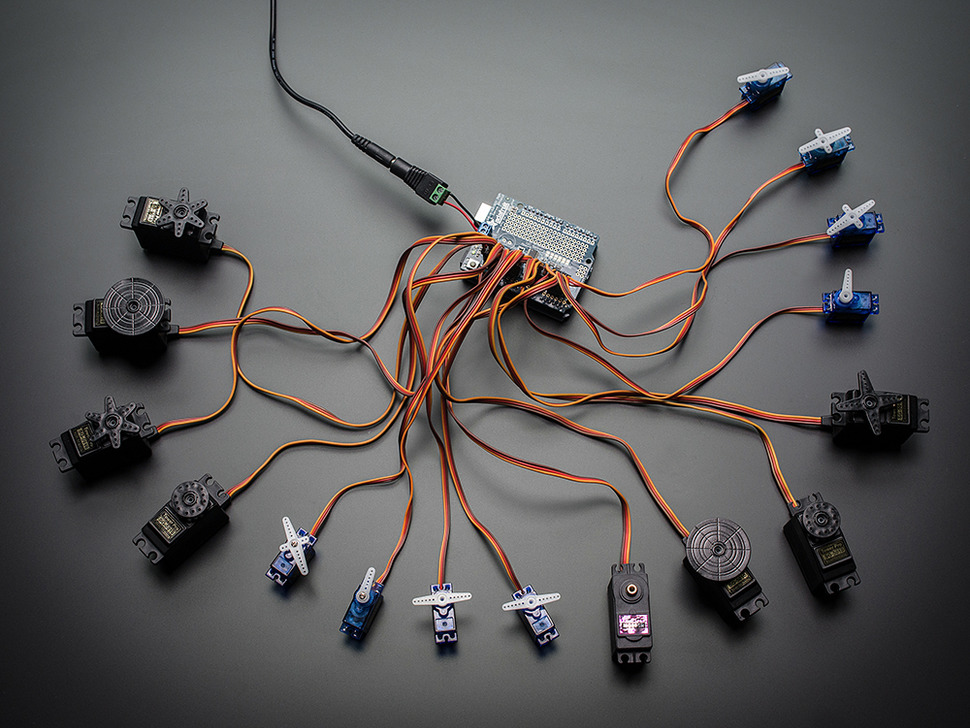
Do you want to make a cool Arduino robot with ARC? Maybe a hexapod walker or a piece of art with many moving parts. The PCA9685 servo breakout (also found in Adafruit's popular PWM/Servo pcb) that works with any Arduino that uses shields: Uno, Leo, Mega, or ADK. We recommend using the Uno because it is compact and, combined with this shield, provides a ton of I/O. However, there are several EZB firmwares on this page that you can use for your desired configuration.
The Arduino can be programmed with the EZB firmware for various capabilities when connected to ARC. The tutorial to program the EZB firmware can be found HERE.
Download Firmware Sourcecode
- Mickey's Firmware (Mar 4, 2019)
- EZ-Genuino_Uno_Adafruit_16_Servo_Shield.zip (Dec 11, 2022)
- Miller's Generic PCA9685 EZB_UNO_PCA9685.zip
Tutorial
Now that you have the firmware, you can follow the tutorial to install it by clicking here.
Related Tutorials
Related Questions

Skill For Serial Waveshare Servos
Meccano Meccanoid Upgrades/Mods

Upgrade to ARC Pro
Experience early access to the latest features and updates. You'll have everything that is needed to unleash your robot's potential.
Hi just wanted to know if there was any support for using this servo controller with raspberry pi and an Arduino
Install ARC on a windows pc. Install the ezb firmware on this servo controller and connect to it. The instructions are above
I don't have a Adafruit's popular PWM/Servo Breakout, sorry
I use the PCA9685 for many servos
2 for 14.79 https://www.amazon.com/pca9685/s?k=pca9685
Ive been trying to use this with uno and adafruit break out board. Will not work at all in ARC, no issues with running all ports in arduino.ide and IC2... I have done the above suggestions with no avail. I must be overlooking something? But with almost 9 hours into it, cannot find a solution.
Trying to bring an old Manoi PF01 back to life, cannot use the KRS skill as the uno reports as not compatible. While I'm here, anyone been able to use ARC to talk with the Kondo RCB-3HV controller?
May have to wait and nab one of ez-robot controllers and hope for the best. Thanks in advance for any help offered. - Tom
I am using an Arduino uno with a PCA9685 for 8 servos in this video.
Make sure you use a separate power (5 V to 7.4 V) for the PCA9685
I am also using the Auto position, speech recognition, some scripts and the audio toolbox plug-in for the Mark voice you hear.
I Works best with a IOTiny, Wi-Fi https://youtu.be/CFk0pAUx_gw
I don't think you need an ezrobot controller for this. From what I understand how it works, you need an Arduino.
What stage are you stuck at?
Program the arduino with the source above (Mickeys firmware)
Connect ARC to the arduino
Move servos (I'm guessing they're going to be D0-D15?)
Hey DJ,
I've programmed my UNO with Mickeys firmware, and a PCS9685 (adafruit). Connecting to ARC is no issue, it see's my board, I can do other functions with it, just not operate any servos. Yes, I've addressed them as D0-D15, then just focused on getting only one port to communicate, addressing differently, trying other hobby servos, others codes and suggestions, nada.
Tried with the KONDO skill, errors for "Hardware UART TX/RX with DMA buffer and adjustable baud rate - not supported on EZB device"
So scratched using that skill and tried many obvious things to troubleshoot why I cant control, or possibly better explain, why I cant access the breakout board over I2C with ARC on 2 different boards using PWM. When I reflash the UNO's with stock firmware and run the adafruit lib in IDE, all servos (KRC-4024) function with all boards.
I'm left to believe the problem is between ARC/ UNO and breakout, (even though ARC sees it too), getting nothing on the scope on the I2C ports while using ARC... I've tried assigning ports to the board which work, then to the breakout, tried another UNO and still can't get them to talk. 2 Different UNO's and 2 adafruit breakouts. Totally could be something I've missed...
The reason for shifting towards EZRobot controller was size and built in modes of communication, AI Etc. Really wanting to use auto gait, etc instead of coding movements for weeks. I will say I've used ARC with UNO's before but with wheel/tracked/arm builds without issue, using no expansion/breakout boards.
Sorry for the delay, work has been keeping me busy. And do appreciate you reaching out, love what you are doing and bring the live hacks back, pro subscription coming. -Tom
Hi Tom,
With my Arduino I also had no servo movements action UNTIL I added a separate power supply to the PCA9685 - 5v to 7.4v will do
Maybe you are doing this, but you did not state this above.
Hey EzAng,
Yes they are on their dedicated power supply. When flashed with stock Arduino firmware and adafruit lib, all servos work 100%. Not changing anything but to the ARC firmware, etc. Zero functionality with any servo functions...
You downloaded https://synthiam.com/Support/Hardware/16-Servo-Shield
and
did you connect on a com port?
the BAUD_RATE. - 57600
in ARC baud rate is 57600
Yup, tested too many times to count. Precisely modified as you posted. No servo Control W/ ARC/No I2C activity... Works 100% of the time manually in arduino.ide! May shelf this project until I can source a different controller. Appreciate all the ideas though! - Tom
I am having the same issues servos not working in ARC
Hi Tom,
I went through the steps that used to stop ARC for me:
1 - the wrong baud rate, need 57600 in ARC for the Arduino 2- missing a separate 5v or 6v power supply for the PCA9685
The last thing that usually stops ARC for me was my Anti-Virus program I was using. You can add it to your Anti-Virus program or just shut it off and check to see if that is the problem.
That is all I can come up with at this time, sorry.
Comment removed
Whoa, what is that code? There is no way that code compiles O_o
Here try this: EZ-Genuino_Uno_Adafruit_16_Servo_Shield.zip
I just tried DJ code above, using the PCA9685 with 8 servos, a Arduino uno for this test, also works well
DJ that was the code EzAng said was needed in Post #10 of his. That is why I said what I said in my post. Anyway I loaded your new firmware and the above video shows you how well it works. Note I did test that all this hardware works using the Adafruit PWM servo script and it worked great.
Also ARC is the latest version and is connected to the UNO at 57600 baud as stated above.
comment removed
EzAng
A4-5 are SCL and SDA on the Arduino
DJ, tried the .zip you posted earlier, still no servo control. All is wired and assigned correctly. Hardware is 100% functional outside of ARC. Inside of ARC, nothing.
Smiller29, Also tried your way with no results. I have mine connected to the dedicated pins, R3 has them closest to the reset button, and labeled on the bottom of the board, with SCL closest to switch and SDA the next one over, beside AREF. I get the same as your video regardless which boards or breakouts used.
As I've said before, used ARC for other projects that DID NOT require an expansion board and all work, so still focusing on ARC-UNO-Breakout communication failure, as my exact set up works outside of ARC... Hours looking through code, etc and can't find the smoking gun here. Good luck, and I'll be following updates.
comment removed.
Using the other pins has no impact on making it work. This is a code issue.
Like I said:
I tried DJ's, Micky's code - it works
I modified their code, it all compiles and uploads it also works,
It maybe working for you but it is not working for Tom and I. I know the hardware works when you take ARC and this code out of the picture. I am using the latest 16 port board lib versions. Also the current IDE and the current ARC. This is not a connection problem or Hardware problem. This is a code issue somewhere.
comment removed now
OK Guys I was able to get this to work for me after making changes to the firmware please try the attached file. I have put comments in the code around my changes. DJ please review and test so you can update the package above..
EZ-Genuino_Uno_Adafruit_16_Servo_Shield-SMM.zip
comment removed
What did not work? was there and issue with the zip?
That's ok,
Micky's and DJ,s code work, and my modified file works well also
Comment removed as I don't like post large code scripts.
@ smiller29 - Solid work my friend, I am a amateur extra VE out of middle TN, will shoot you an email. Everything works on both breakouts. A++/ Knew I wasn't crazy!
@DJ - Thanks for posting the code up top. Proves the community based center this program has. Look forward to contributing as well. Have several projects to share soon, time allowing.
@EzAng - Thankful for your input too, seems its a specific issue, the more the community knows the better!
Question for the group how many PCA9685 can be chained together using this firmware and ARC? The below is how you would do it writing code without ARC.
Chaining Drivers Multiple Drivers (up to 62) can be chained to control still more servos. With headers at both ends of the board, the wiring is as simple as connecting a 6-pin parallel cable from one board to the next.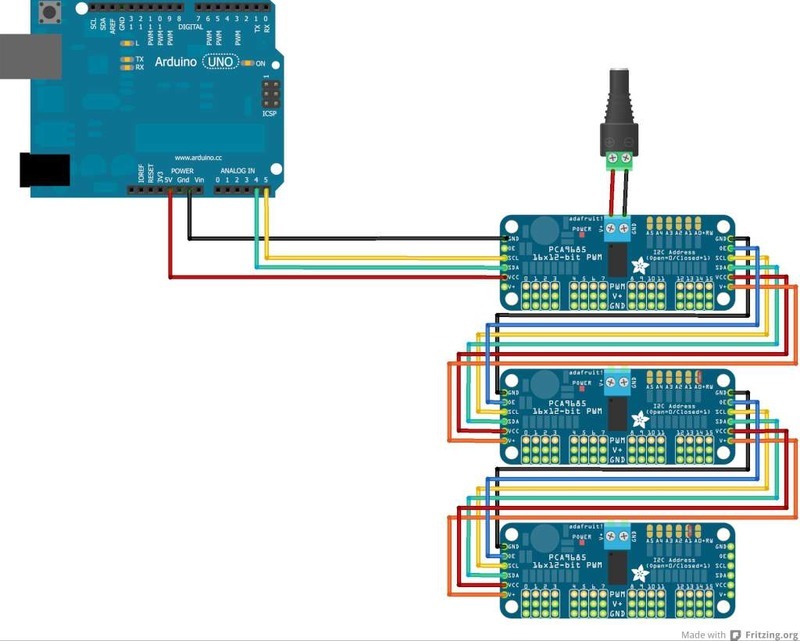
Addressing the Boards Each board in the chain must be assigned a unique address. This is done with the address jumpers on the upper right edge of the board. The I2C base address for each board is 0x40. The binary address that you program with the address jumpers is added to the base I2C address.
To program the address offset, use a drop of solder to bridge the corresponding address jumper for each binary '1' in the address. adafruit_products_2012_10_13_IMG_0692-1024.jpg Board 0: Address = 0x40 Offset = binary 00000 (no jumpers required) Board 1: Address = 0x41 Offset = binary 00001 (bridge A0 as in the photo above) Board 2: Address = 0x42 Offset = binary 00010 (bridge A1) Board 3: Address = 0x43 Offset = binary 00011 (bridge A0 & A1) Board 4: Address = 0x44 Offset = binary 00100 (bridge A2)
etc.
In your sketch, you'll need to declare a separate pobject for each board. Call begin on each object, and control each servo through the object it's attached to. For example:
Great info on th this site https://learn.adafruit.com/16-channel-pwm-servo-driver?view=all
I read the connections on the PCA9685 module are duplicated on each end, making it easy to use multiple modules. By using right-angled DuPont male and female connectors you could daisy chain the modules. Just make sure to select a unique I2C address for each module.
Wow, 992 servo motors, like to see that project, lol
Thanks for your reply. I just want to be clear if I I connect three of these boards together that ARC can address each boards ports. Also what are the changes needed to the firmware to support more than one board? Because looking at the firmware I don't see how this would work.
on ARC, not sure, was using an Arduino.
I can test when I get back However, I would think it is one board on ARC
correct the firmware needs to be updated with each PCA 9685 you add
// Creat object to represent PCA9685 at default I2C address Adafruit_PWMServoDriver pca9685 = Adafruit_PWMServoDriver(0x40);
**(adding another PCA 9685 ) Adafruit_PWMServoDriver pca9685 = Adafruit_PWMServoDriver(0x41);
**(adding another PCA 9685 ) Adafruit_PWMServoDriver pca9685 = Adafruit_PWMServoDriver(0x42);
now you have 48 servos
and so on
I don't think you'd be able to do that very easily. You'd have to create a custom robot skill and extend the existing ezb protocol. The ezb protocol supports 25 servos - a legacy from the ezrobot days. There are two alternatives...
Hard way. Have a robot skill servo driver, similar to Dynamixel, which uses a custom protocol that extends the servo count. Or use the servo Script: https://synthiam.com/Support/Skills/Scripting/Servo-Script?id=19068
Easy way. Have 3 arduinos and 3 pca's. Connect each Arduino to a different physical port
If you decide to go the hard way, the servo Script can send a custom serial command for each servo and position. It isn't super difficult, but you'd have to make your own firmware.
DJ thank you for confirming the limitation. I thought this could not be done with this skill without a lot of changes.
the servo Script skill doesn't require any changes. Just send the servo id and position for each servo. Your arduino code merely has to listen on a loop to get the servo id and position
Smiller29,
Here is a video for Linking Multiple PCA9685 servo Driver Boards
https://youtu.be/v1f_EDHV390
EzAng, Thanks for posting this but I wanted a solution that works in ARC.