





I have gotten half way through my wall-e and the comments stopped so im reposting it.
I just got my needed servo extensions from china after 1.5 months.(why i stopped posting: Waiting eyeroll)
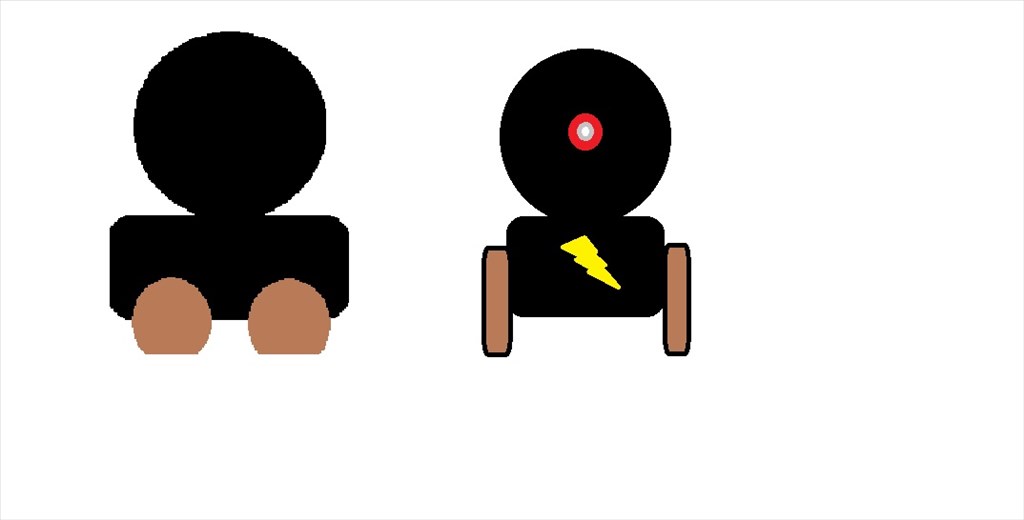
so this is where im at:

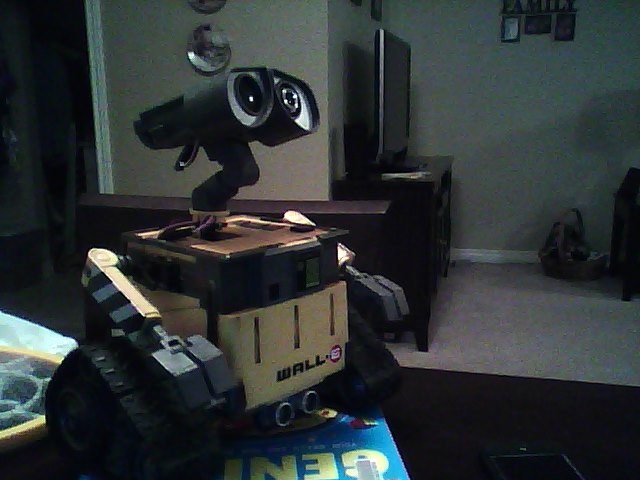
Arms and tracks are done, but untested. head horizontal servo is ready but the camera has to be hacked and led has to be modded and connected to the ez-b. also have to put servo in the head.
any ideas for head tilt mounting will be appreciated.
By CardboardHacker
— Last update
Other robots from Synthiam community

Rich's Jarvis Add-On #1
Robots needed be mobile, walking, talking beings... so I plan to do something I doubt has been thought of before... Im...
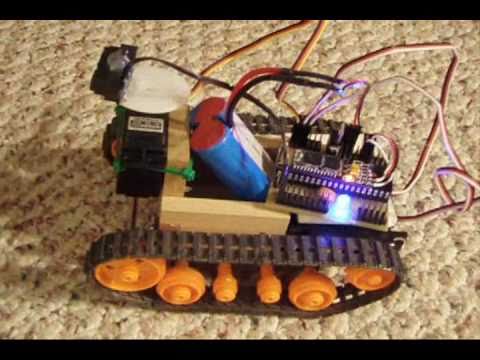
DJ's Tamiya Bulldozer Robot
This is a tutorial on how to modify the Tamiya Bulldozer to be driven by modified servos rather than the DC motorset....
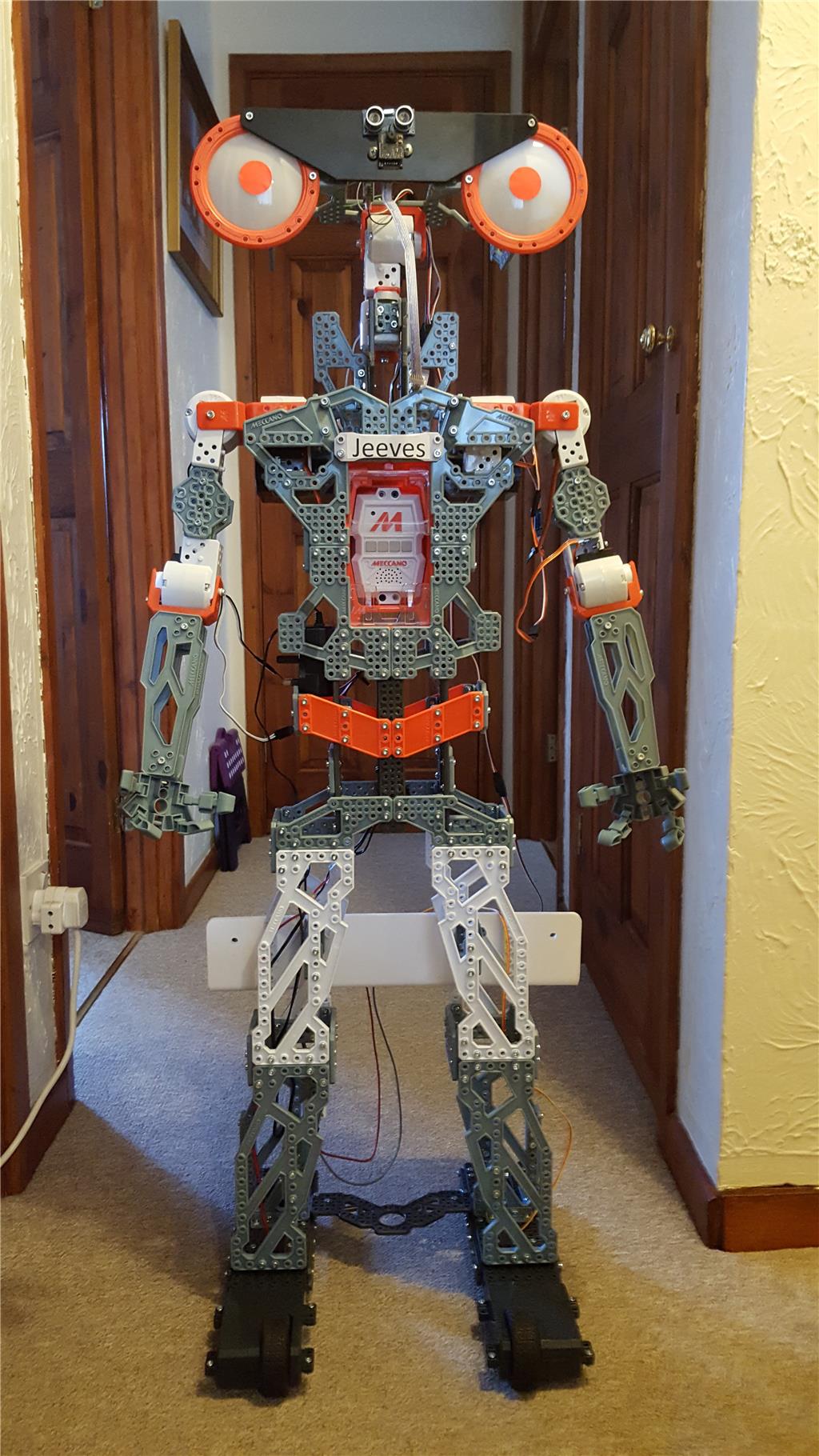
Tezsmith's Giving A Meccano G15 Ks An Ez Makeover
Hi there, my name is Tez, I have just completed EZ-Robotifying my G15 KS. Not a technical term but sounds good anyway....

I had a similar wait for servo extensions from China which meant I couldn't do anything on my build but wait for the first month or so... Now I have around 500 servo extensions due to impatience and ordering more from a different place, and more from another different place... At least now I know I wont run out any time soon.
He is getting there, although the head can be the hardest part, fitting in the camera and all that. But you seem to have made good progress on the base, looks pretty much stock which I love on there robots, it was my main goal on my Hearoid until I changed the head totally.
Keep it up Before long you will have a whole army of robots at your command.
Before long you will have a whole army of robots at your command.
my next project:
I roll?/crimp my own servo leads. Ya it's a little more work than buying pre-made but everything is custom!
Check out this link. Everything you would need.
www.hansenhobbies.com/products/
thanks.
just noticed the camera is different from his hacking video.
have any of you hacked the latest ez-camera?
Both cameras I've had have been the same black camera (only difference is the one in DJ's video is blue).
They are the same inside.
You can do it with the USB as DJ shows or can connect direct to where the battery is (and remove the battery) plus the signal to the spot shown in the camera hacking topic. Like I said, I have done 2 of them now without a problem (although turning on and off in ARC takes some fiddling with script and timings).
but the light is in a different spot. still solder to the pin behind the light?
do you have a picture?
i need to know where to solder that signal cable.
ok so i have moded the camera and soldering the ultra distance sensor.
mainly working on my rc car project. done everything i can do on it so im back to my wall-e.
any ideas for the head tilt mount?
I am sorry to say that my $300 wall-e is a failed project.
he fell apart during testing and his software is messed up.
he is missing an arm and his track fell off and broke 3 plastic welded points.
i am not sure about completeing him after this.
Don't give up! Take a break. Broken parts can be fixed as well as the software. Sleep on it and try again later.
thanks troy.
im mourning the lost heavily
I agree with Troy.
For my Wall-E project, I have:
And It don't talk about scripting....
But I have learn a lot and I think I am ready to a bigger project... Don't give up!
i have extra treads if you need em....
as far as the head tilt.....i put up tons of piucs of y set up for the head.
i get full function (up, down, left, right and eye tilt) 2servos in each eye and 2 servos in the neck..
in the threards look for "pics of progress" just updated the thread..
let me know about the treads...ebverthign else seems like it can be fixed...
also troy walked me off the ledge too a while back...iw as so frustrated. but i can honestly say take some time off the project and come back with fresh eyes.
i also hev 2 arms
thanks everyone.
i think ill finish my rc car ball-bot and then go back to wall-er
Cheer up. I've been working on my robot for a few years now. Just about everything had to be redone several times If it was too easy, there would be no point in doing it. The satisfaction comes from solving problems that you didn't. think you could. Give it a break and go back to it when it's fun again.
I guarantee everyone has at least 1 failed story, but few let it stop them :)
I've built my robots arms 3 times already, planning the 4th attempt next week and have plans for a 5th attempt too...
Only earlier today I put the head of mine all back together thinking it was done... Walked in to the kitchen (my workshop) and saw the antenna for the camera lying on the worktop... And the head is complex and tight so I wasn't pleased that I had to take it apart again and make adjustments to accommodate the antenna!..
Wasted a perfectly good, almost new LiPo battery by allowing it to go under voltage.
Cut away all of the top of the neck then found I needed it to house a servo so had to repair a 3" hole with fibre glass.
And countless other minor annoyances :)
Spare parts are often sourced here, I've just sent Lumpy some parts for his Omnibot and I've seen countless others supply parts so all is never lost.
As for the software, once it's all built and you get on to sorting the software out it's easy. Anything you get stuck with just ask about and I'm sure we can sort it between the lot of us. There's nothing wrong with asking for a helping hand That's why we are all here after all.
That's why we are all here after all.
When it all gets too much for you take a step back, make a coffee, grab a beer or whatever your vice is and take your mind off it for a while. I find it's those times I come up with my best ideas and solutions.
Edit: Look at post #5 of my hearoid Project and you'll see my attempt at fixing the arm which I cut too short. The repair didn't work very well so that was 2 goes at the arm.
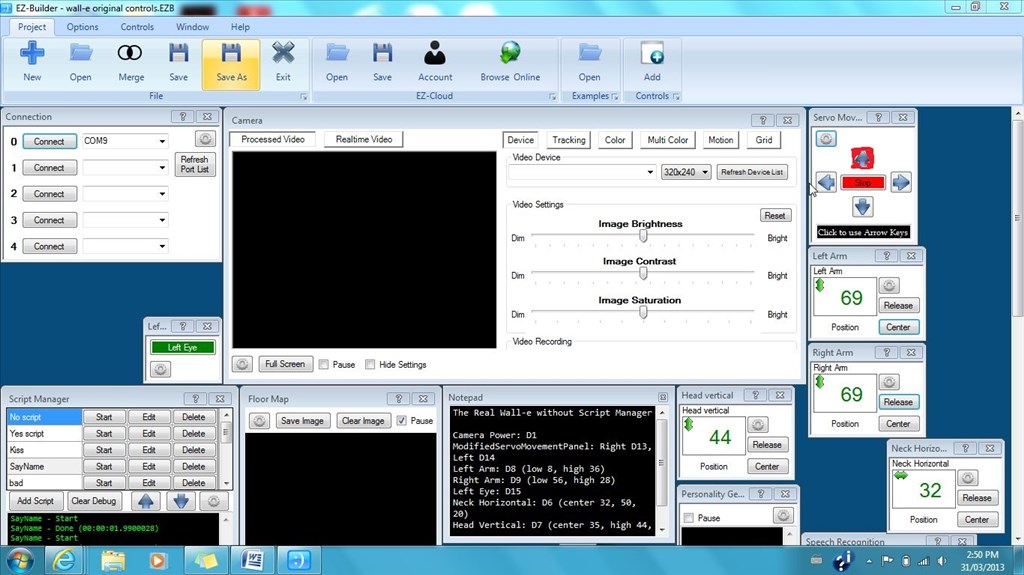
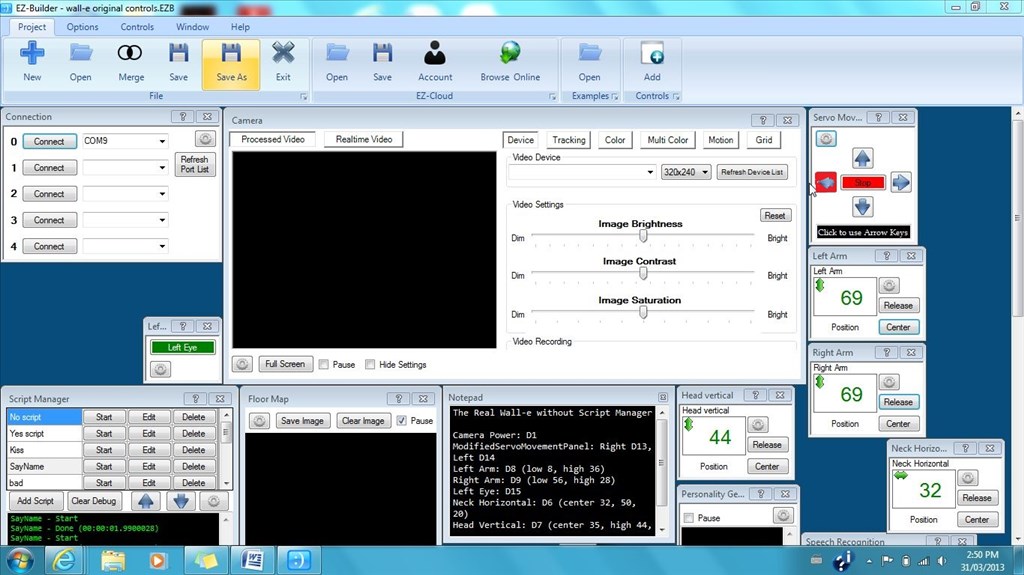
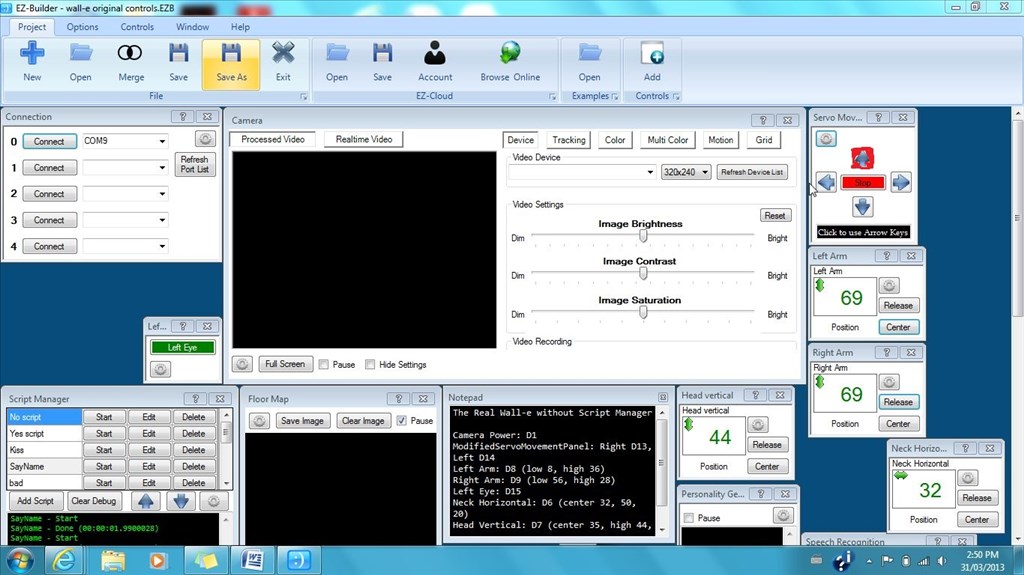
found a bug in ARC. when i was playing with dj's example i screwed up the values and caused it to back up instead of go forward.
but it also did a weird forward, left, forward, left change when i said go forward. it only happens when i have the ez-b connected.
example:
ect.
Was nothing else controlling the movement panel? Such as the personality generator or distance sensors?
Not quite sure what you mean by you screwed up the values. Or what's shown in the screenshots other than the movement panel... Can you elaborate?
i press forward on the movement panel, it randomly changes back and forth from forward to left. it only happens when the ez-b is connected.
also the servos were reversed so it drove backwards.
Oh, so a bug in the project file not in ARC.
The servo direction is pretty simple, your servos are either around the other way or run the other way to those DJ used. Tick the invert box to solve.
The Movement Panel issue sounds like something else is causing it to move. Most probably a radar control or script that is only operational while "moving forwards". If you don't have the ping sensor attached but the control is running it will think there is an object in front of it.
Just complete guesses, I haven't looked at the project at all but it's most likely those.
Your best bet is to start from scratch though, it's also more enjoyable.
radar was paused. that might be the cause.
i took dj's example, played with it. then started adding controls and other things. pretty savy with ez-script.
I will be recreating wall-e's controls to ensure quality. I will be fixing his tracks and arms(arms first) and will most likely have him running by my birthday(June 14, or so that's my goal)
I have 3 1/10 RC trucks laying around in my garage collecting dust. I was suppose to use them with EZ-B and turn out to be more difficult than I thought. I curious to see your R/ project. I bet they will be awsome. Don't give up, put it down relax, do small projects her and there until you are ready for wall-E.
Wall-e is almost done! His arms have been remounted and the tracks are almost ready to be fitted. Due to me misaligning the servo I tried to plastic weld the mounting piece and that broke off. So, shave the plastic mould off and screw it into a block of wood. The camera is wired up and in place(untested) and the led is connected to a servo extension so I can plug it in. Once the tracks are done I just need to test him and then add the head tilt servo(looking for suggestions for mounting) and ill he'll be finished!
Photos and vids to come soon!
Ok so I have started remaking his project file. I also tested my wiring for my camera and it works. I set the min and max for the head turning servo. His left track is almost fixed and today I will work on the right track. Once that's done all that's left is the head tilt.
Once again any ideas on the head tilt servo mount? I'm looking to try to hide the servo as well as possible.
Technopro's wall-e video!
He has been tested and can drive around now. radar works alright, but in testing he would turn partially and would hit the wall with his left track. Will post video of him flying(more so crawling) around. Some pics: